
Apr 23, 2010 - Modules -  Colors » Color Calibration
The Color Calibration module provides a way to better align the colors
within an image to that of reality. This is accomplished by including
a standardized color chart within the image that can be used as a color
reference. By aligning the image color chart with the known color chart
the rest of the image's pixels can be moved towards the calibrated colors.
Colors » Color Calibration
The Color Calibration module provides a way to better align the colors
within an image to that of reality. This is accomplished by including
a standardized color chart within the image that can be used as a color
reference. By aligning the image color chart with the known color chart
the rest of the image's pixels can be moved towards the calibrated colors.
Mar 18, 2010 - Promotion -  Partnered with Hackaday, Woot has a Rovio Special at $99.00! For a limited time only get your
copy of RoboRealm at a huge discount along with the Rovio robot.
Partnered with Hackaday, Woot has a Rovio Special at $99.00! For a limited time only get your
copy of RoboRealm at a huge discount along with the Rovio robot.
Mar 8, 2010 - Modules -  Control » Other » DMP RoBoard
The RoBoard module provides an interface to the intrinsic control capabilities of the RoBoard nano sized
PC based computer board. This miniature computer can run RoboRealm (assuming WinXP is installed)
and provides a shared 24 PWM servo or digital IO pins and 8 analog in pins (not to mention the ability to
attach a USB webcam!). This PC was built for
embedded robotics and offers a great solution for onboard processing with RoboRealm.
Control » Other » DMP RoBoard
The RoBoard module provides an interface to the intrinsic control capabilities of the RoBoard nano sized
PC based computer board. This miniature computer can run RoboRealm (assuming WinXP is installed)
and provides a shared 24 PWM servo or digital IO pins and 8 analog in pins (not to mention the ability to
attach a USB webcam!). This PC was built for
embedded robotics and offers a great solution for onboard processing with RoboRealm.
Mar 8, 2010 - Modules -  Control » Robots » Lego NXT
The Lego Module has been upgraded to increase the ability and flexibly of the Lego NXT robotics kit by supporting the mindsensors.com NXT Servo board. Now
you can control an additional 8 regular RC servos using this handy extension to the Lego NXT system using the I2C bus capabilities.
Control » Robots » Lego NXT
The Lego Module has been upgraded to increase the ability and flexibly of the Lego NXT robotics kit by supporting the mindsensors.com NXT Servo board. Now
you can control an additional 8 regular RC servos using this handy extension to the Lego NXT system using the I2C bus capabilities.
Mar 4, 2010 - Modules -  Control » Robots » CoroWare CoroBot
Provides an interface to the CoroWare CoroBot robot. The CoroBot is a PC based robot that
contains an ITX motherboard that is very capable of running RoboRealm onboard the
robot. With standardized interface boards the PC can control the robot to perform many
complex tasks including robot vision. The new RoboRealm CoroBot module quickly gets you started
in using RoboRealm with the CoroBot.
Control » Robots » CoroWare CoroBot
Provides an interface to the CoroWare CoroBot robot. The CoroBot is a PC based robot that
contains an ITX motherboard that is very capable of running RoboRealm onboard the
robot. With standardized interface boards the PC can control the robot to perform many
complex tasks including robot vision. The new RoboRealm CoroBot module quickly gets you started
in using RoboRealm with the CoroBot.
Mar 1, 2010 - Modules -  Control » Other » Phidgets 888 Interface Kit
Provides an interface to the Phidgets 888 Interface Kit. The Interface kit has 8 digital output, 8 digital inputs and 8 analog
inputs that provide you with enough inputs and outputs to interface with many sensors.
Control » Other » Phidgets 888 Interface Kit
Provides an interface to the Phidgets 888 Interface Kit. The Interface kit has 8 digital output, 8 digital inputs and 8 analog
inputs that provide you with enough inputs and outputs to interface with many sensors.
Feb 15, 2010 - Modules -  Control » Robots » GCtronic Epuck
- The GCtronic e-puck module provides an easy way to interface RoboRealm to the GCtronic e-puck robot sold
in the USA by RoadNarrows Robotics. The E-puck
has several sensors and is an ideal robot for small desktop based research and experimentation. More about
this great little Swiss robot can be found at the RoadNarrows website.
Control » Robots » GCtronic Epuck
- The GCtronic e-puck module provides an easy way to interface RoboRealm to the GCtronic e-puck robot sold
in the USA by RoadNarrows Robotics. The E-puck
has several sensors and is an ideal robot for small desktop based research and experimentation. More about
this great little Swiss robot can be found at the RoadNarrows website.
Feb 15, 2010 - User Projects -  Control of a Mitsubishi Arm using Fiducial tracking
- Prof Martin Mason and his partner Laurent Coudert have put together a great tutorial on controlling an industrial robotic arm using computer vision.
It is definitely worth a read and also spending some time on ProfMason.com to read about all the other projects
he has been up to.
Control of a Mitsubishi Arm using Fiducial tracking
- Prof Martin Mason and his partner Laurent Coudert have put together a great tutorial on controlling an industrial robotic arm using computer vision.
It is definitely worth a read and also spending some time on ProfMason.com to read about all the other projects
he has been up to.
Feb 15, 2010 - ![]() Extensions » Python Program
- To accompany the embedded VBScript module, the Python module offers the same immediate simplicity of performing basic programming within RoboRealm
without having to jump into Plugin or API development. With the popularity and extensive support for Python we are sure that this will be a welcomed
addition to RoboRealm's ability to be extended beyond its base programming.
Extensions » Python Program
- To accompany the embedded VBScript module, the Python module offers the same immediate simplicity of performing basic programming within RoboRealm
without having to jump into Plugin or API development. With the popularity and extensive support for Python we are sure that this will be a welcomed
addition to RoboRealm's ability to be extended beyond its base programming.
Feb 15, 2010 -  Control » Servos » Pololu Maestro
- The Pololu Maestro servo controller board provides great fine tune control
for up to 6 servo's per board. The Maestro is small, compact and understands USB directly (you can still use COM if you want too) to avoid the
COM port selection confusion. Just plug in the board and the servos start responding with little configuration.
Control » Servos » Pololu Maestro
- The Pololu Maestro servo controller board provides great fine tune control
for up to 6 servo's per board. The Maestro is small, compact and understands USB directly (you can still use COM if you want too) to avoid the
COM port selection confusion. Just plug in the board and the servos start responding with little configuration.
Feb 11, 2010 - User Projects -  API Wrappers Classes
Rud Merriam has put together a great extension to the C++ API methods by adding a couple classes that make
working with RoboRealm Variables easier. Check out his blog at Mystic Lake Software for that and other
interesting technology development.
API Wrappers Classes
Rud Merriam has put together a great extension to the C++ API methods by adding a couple classes that make
working with RoboRealm Variables easier. Check out his blog at Mystic Lake Software for that and other
interesting technology development.
Jan 28, 2010 - User Projects -  Object Tracking Using Visual Filters
PiRobot put together a new robot using Dynamixel AX-12+ servos and tested an algorithm for tracking a moving
object. The camera used is a DLink 920 wireless operating over 802.11g with the visual tracking being done by
RoboRealm. A great writeup (worth checking out) describes how this was done.
Object Tracking Using Visual Filters
PiRobot put together a new robot using Dynamixel AX-12+ servos and tested an algorithm for tracking a moving
object. The camera used is a DLink 920 wireless operating over 802.11g with the visual tracking being done by
RoboRealm. A great writeup (worth checking out) describes how this was done.
Dec 21, 2009 - User Projects -  Millswood GCS for Attopilot
Millswood Engineering has released a RoboRealm based GCS for Attopilot which intrinsically supports the
Failsafe by sending out heartbeats and reading a joystick to control pan, tilt and zoom outputs. The GCS writes
KML files, and timestamps everything to allow you to replay your flights within Google Earth, and if there are
markers they will appear at the correct time. The download comes with a replay robofile which allows you to
preview the system without an active connection.
Millswood GCS for Attopilot
Millswood Engineering has released a RoboRealm based GCS for Attopilot which intrinsically supports the
Failsafe by sending out heartbeats and reading a joystick to control pan, tilt and zoom outputs. The GCS writes
KML files, and timestamps everything to allow you to replay your flights within Google Earth, and if there are
markers they will appear at the correct time. The download comes with a replay robofile which allows you to
preview the system without an active connection.
Dec 21, 2009 - Modules - ![]() Spherical Transform
The Spherical Transform module, as does the Fisheye and Radial modules, also corrects for wide angle lens distortion.
The Spherical module attempts to preserve objects on the edges of the image to achieve a wider angle correction
than the other transform modules. The Spherical module creates more appealing results on wide angle images
taken from a forward looking camera.
Spherical Transform
The Spherical Transform module, as does the Fisheye and Radial modules, also corrects for wide angle lens distortion.
The Spherical module attempts to preserve objects on the edges of the image to achieve a wider angle correction
than the other transform modules. The Spherical module creates more appealing results on wide angle images
taken from a forward looking camera.
Dec 21, 2009 - Modules - ![]() Fisheye Transform
The Fisheye Transform module helps to unwarp an image created by a fisheye lens to a more usable format where
lines appear straight. The Fisheye Transform module uses a fisheye lens model in order to achieve this
rectification in an easier way than the Radial Transform module. The Fisheye module creates more appealing results on images
taken from an omnidirectional camera.
Fisheye Transform
The Fisheye Transform module helps to unwarp an image created by a fisheye lens to a more usable format where
lines appear straight. The Fisheye Transform module uses a fisheye lens model in order to achieve this
rectification in an easier way than the Radial Transform module. The Fisheye module creates more appealing results on images
taken from an omnidirectional camera.
Dec 7, 2009 - Modules -  Endurance WiFi Servo Controller
The Endurance WiFi Servo Controller module allows you to interface RoboRealm to servos using a controller made by Endurance R/C
The WiFi based servo controller supports up to 8 servos and can be controlled over a WiFi 802.11
wireless signal. The connection to the remote board appears as a COM port to the host PC.
Endurance WiFi Servo Controller
The Endurance WiFi Servo Controller module allows you to interface RoboRealm to servos using a controller made by Endurance R/C
The WiFi based servo controller supports up to 8 servos and can be controlled over a WiFi 802.11
wireless signal. The connection to the remote board appears as a COM port to the host PC.
Dec 7, 2009 - Modules -  Velleman K8055
The Velleman K8055 module provides an interface to the Velleman board from RoboRealm.
The K8055 interface board has 5 digital input channels and 8 digital output channels. In addition, there
are two analogue inputs and two analogue outputs with 8 bit resolution.
Velleman K8055
The Velleman K8055 module provides an interface to the Velleman board from RoboRealm.
The K8055 interface board has 5 digital input channels and 8 digital output channels. In addition, there
are two analogue inputs and two analogue outputs with 8 bit resolution.
Nov 6, 2009 - Modules -  Blob Split
The Blob Split is functionally similar to the Open and Watershed modules which seek to split blobs into reasonable
separate blobs in order to allow for additional processing on single objects. Blob splitting is very useful when
objects cannot be segmented into separate objects and are touching each other. Running any statistics or shape matching
on connected objects would cause incorrect results. The Blob Split module offers more control over the splitting process than previous modules.
Blob Split
The Blob Split is functionally similar to the Open and Watershed modules which seek to split blobs into reasonable
separate blobs in order to allow for additional processing on single objects. Blob splitting is very useful when
objects cannot be segmented into separate objects and are touching each other. Running any statistics or shape matching
on connected objects would cause incorrect results. The Blob Split module offers more control over the splitting process than previous modules.
Oct 8, 2009 - User Projects -  Hexapod RoboVision over IP
Hexapod, Eyera Anubis, is spider-like robot with robotic vision using RoboRealm. 3 Degress of Freedom, 3 leads on each limb (Coxa,
Femur, Tibia), that determine the mechanics of movement. Additionally 2 drives provide Pan & Tilt on the camera. A total of 20 servos. More
specifications and material used can be found here.
See the robot in action here.
Hexapod RoboVision over IP
Hexapod, Eyera Anubis, is spider-like robot with robotic vision using RoboRealm. 3 Degress of Freedom, 3 leads on each limb (Coxa,
Femur, Tibia), that determine the mechanics of movement. Additionally 2 drives provide Pan & Tilt on the camera. A total of 20 servos. More
specifications and material used can be found here.
See the robot in action here.
Oct 8, 2009 - Modules -  Control » Motors » Phidgets Motor Control
The Phidget Motor Controller module allows you to interface RoboRealm to the Phidgets Motor Controllers (LV and HC).
Both motor controllers are USB based and can control two brushed DC motors independently for
direction, velocity and acceleration. The LV (low voltage) version also has 4 digital inputs.
Control » Motors » Phidgets Motor Control
The Phidget Motor Controller module allows you to interface RoboRealm to the Phidgets Motor Controllers (LV and HC).
Both motor controllers are USB based and can control two brushed DC motors independently for
direction, velocity and acceleration. The LV (low voltage) version also has 4 digital inputs.
Oct 5, 2009 - Modules -  Colors » Align Histogram
The Align Histogram module is a useful precursor to any image comparison routines
such as template matching, cross correlation, stereo depth or simple image subtraction. The
Align Histogram module takes as input two images and will align the colors in the "source" image
with those specified in the "target" image.
Colors » Align Histogram
The Align Histogram module is a useful precursor to any image comparison routines
such as template matching, cross correlation, stereo depth or simple image subtraction. The
Align Histogram module takes as input two images and will align the colors in the "source" image
with those specified in the "target" image.
Sept 30, 2009 - Modules -  Control » Robots » A-WIT BOL-BOT
The BOL-BOT is unique in the sense that users develop a robotics platform as an embedded
system using professional software development tools and a professional programming
language in a very user friendly environment. The versatility of the
C Stamp guarantees that you can expand your robot as needed. The A-WIT_BOL_BOT module provides
and interface to the BOL-BOT from RoboRealm and allows you to add vision capabilities to
the BOL-BOT platform.
Control » Robots » A-WIT BOL-BOT
The BOL-BOT is unique in the sense that users develop a robotics platform as an embedded
system using professional software development tools and a professional programming
language in a very user friendly environment. The versatility of the
C Stamp guarantees that you can expand your robot as needed. The A-WIT_BOL_BOT module provides
and interface to the BOL-BOT from RoboRealm and allows you to add vision capabilities to
the BOL-BOT platform.
Sept 30, 2009 - Modules -  Control » Servos » Nubotics Wheel Commander
The WheelCommander™ controller takes the burden of complex feedback control firmware off
of the main robot controller. Motor control is derived from geometrical robot dimensions to create a highly abstracted
motion control module. The WheelCommander module provides an interface to the WheelCommander
controller.
Control » Servos » Nubotics Wheel Commander
The WheelCommander™ controller takes the burden of complex feedback control firmware off
of the main robot controller. Motor control is derived from geometrical robot dimensions to create a highly abstracted
motion control module. The WheelCommander module provides an interface to the WheelCommander
controller.
Sept 18, 2009 - Modules -  Point Features » Peak Valley Probe
Similar to the Edge Probe, the Peak Valley Probe module provides a way to detect peaks and valleys in
pixel intensities along a specified line. This is handy when detecting patterns or pixel frequencies.
Point Features » Peak Valley Probe
Similar to the Edge Probe, the Peak Valley Probe module provides a way to detect peaks and valleys in
pixel intensities along a specified line. This is handy when detecting patterns or pixel frequencies.
Sept 10, 2009 - Modules -  Analysis » Line Profile
Sometimes it is just hard to visualize pixel data in a way that helps with analysis. The Line Profile module
provides a nice way to "see your data on its side" and gain a better understanding of what the pixel value
terrain actually looks like in an image. The Line Profile tool is a good way to get started on developing
a more advanced processing algorithm by understanding the basics of pixel value changes.
Analysis » Line Profile
Sometimes it is just hard to visualize pixel data in a way that helps with analysis. The Line Profile module
provides a nice way to "see your data on its side" and gain a better understanding of what the pixel value
terrain actually looks like in an image. The Line Profile tool is a good way to get started on developing
a more advanced processing algorithm by understanding the basics of pixel value changes.
August 13, 2009 - Modules - Expressions
Many modules allow for [variable] to be used in place of static numbers. This flexibility allows for either
use of standard numbers or variables in a fields that can be used either way. The most recent release allows
for full expressions to now be specified in addition to just variables. Prior to this release you could have used the VBScript module to
provide for simple calculations. However, using the [variable] expression is quicker and easier to update. For
example, you can now specify [(120-COG_X)+10] in text fields whereas before only [COG_X] was understood.
August 13, 2009 - Modules - Read/Write Clipboard
Two new modules to read and write to the clipboard allow for immediate processing of images
on the clipboard. This adds another integration possibility that you can use to integrate your own applications
to RoboRealm or allows for some neat capabilities even from other applications. For example, the example
included in the help pages for those modules includes a way to copy and image to the clipboard from a paint
program (using CTRL-C), having RoboRealm immediately process the image and then paste the processed results
back into the paint program even without leaving the application!
June 30, 2009 - Modules -  Probes
For those working in part alignment, quality assurance, etc., (i.e. the meat of industrial Machine Vision) RoboRealm now includes many new probes
that provide you with the additional tools for such tasks. Probes are tools that look for certain features
within a specific location in an image. The results of which can help determine the quality or characteristics
of parts in order to know if they meet manufacturing guidelines. The Edge Probe looks for edges in a specified area,
the Line Probe looks for lines, the Circle Probe looks for circles,
and the Thickness Probe analyses the thickness of objects. Using these
tools assumes that the image has been sufficiently aligned in a known position perhaps using the Orient Image module.
Probes
For those working in part alignment, quality assurance, etc., (i.e. the meat of industrial Machine Vision) RoboRealm now includes many new probes
that provide you with the additional tools for such tasks. Probes are tools that look for certain features
within a specific location in an image. The results of which can help determine the quality or characteristics
of parts in order to know if they meet manufacturing guidelines. The Edge Probe looks for edges in a specified area,
the Line Probe looks for lines, the Circle Probe looks for circles,
and the Thickness Probe analyses the thickness of objects. Using these
tools assumes that the image has been sufficiently aligned in a known position perhaps using the Orient Image module.
June 10, 2009 - Tutorial -  Fun with Surveyor
Surveyor and RoboRealm have teamed up to introduce a powerful combination of hardware and software by bundling the
RoboRealm machine vision application along with every purchased SRV Surveyor robot. With an onboard camera and WiFi
connectivity the computing capabilities of the SRV are extended by using RoboRealm running on a regular
desktop PC to perform more advanced image processing tasks. Using this combination of hardware and software
provides the ability to extend a low power, compact, and mobile hardware platform with significant computing
power without compromising the attractiveness of the platform.
Fun with Surveyor
Surveyor and RoboRealm have teamed up to introduce a powerful combination of hardware and software by bundling the
RoboRealm machine vision application along with every purchased SRV Surveyor robot. With an onboard camera and WiFi
connectivity the computing capabilities of the SRV are extended by using RoboRealm running on a regular
desktop PC to perform more advanced image processing tasks. Using this combination of hardware and software
provides the ability to extend a low power, compact, and mobile hardware platform with significant computing
power without compromising the attractiveness of the platform.
May 15, 2009 - Modules -  Matching » Fiducial
The Fiducial module will track barcode like fiducials in the camera's view. This is
very useful for localization and navigation as it creates known beacons that a robot
can detect and use to find its way. Fiducials are markers that can be easily detected, recognized and
associated with additional information such as mapping, direction or other commands.
Matching » Fiducial
The Fiducial module will track barcode like fiducials in the camera's view. This is
very useful for localization and navigation as it creates known beacons that a robot
can detect and use to find its way. Fiducials are markers that can be easily detected, recognized and
associated with additional information such as mapping, direction or other commands.
May 15, 2009 - Modules -  Other » Skyline
It is often useful to know what is sky and what is ground. The skyline module
provides a suggestion as to how the image might be split in two to effectively divide
the image into two most likely parts. Turns out that this is a nice way to separate
ground from sky!
Other » Skyline
It is often useful to know what is sky and what is ground. The skyline module
provides a suggestion as to how the image might be split in two to effectively divide
the image into two most likely parts. Turns out that this is a nice way to separate
ground from sky!
Apr 23, 2009 - Modules - ![]() Blobs » Blob Tracking
The Blob Tracking module provides a way to track a blob from one image to another
in order to better understand the path an object has taken over time. In any movement tracker
project you need to relate a current blob with a blob in the previous image to know how
an object has moved. The Blob Tracking module provides you with several features that can be
used in combination to define how blobs can be related from image to image.
Blobs » Blob Tracking
The Blob Tracking module provides a way to track a blob from one image to another
in order to better understand the path an object has taken over time. In any movement tracker
project you need to relate a current blob with a blob in the previous image to know how
an object has moved. The Blob Tracking module provides you with several features that can be
used in combination to define how blobs can be related from image to image.
Apr 08, 2009 - Modules -  Variables » Chart Variables
The Chart Variables module provides a way to better view the changes
that occur for a given variable over time by plotting a variable's value
on a moving graph.
Variables » Chart Variables
The Chart Variables module provides a way to better view the changes
that occur for a given variable over time by plotting a variable's value
on a moving graph.
Apr 08, 2009 - Modules - Variables » Filter Variables
The Filter Variables module provides a way to filter a variable's value
over time in order to remove noise generated in a given image.
Mar 13, 2009 - Modules -  Point Features » Cluster Points
The cluster points module provides a way to group pixels into larger objects that may not be connected or might not be separated correctly.
Point Features » Cluster Points
The cluster points module provides a way to group pixels into larger objects that may not be connected or might not be separated correctly.
Feb 18, 2009 - Modules -  Control » Cameras » Linksys Internet Camera
The Linksys module provides an interface to the Linksys internet camera such that the
images can be processed by RoboRealm and pan/tilt commands can be issued automatically to the camera.
Control » Cameras » Linksys Internet Camera
The Linksys module provides an interface to the Linksys internet camera such that the
images can be processed by RoboRealm and pan/tilt commands can be issued automatically to the camera.
Feb 18, 2009 - Modules -  Control » Servos » SOR_Axon
The SOR_Axon provides a module interface to the Axon MCU created and sold by the folks
over at Society of Robots.
With 55+ I/O channels, 16 analog ports, 3 UARTs, and 16 MIPS ATmega640 throughput at 16 MHz it's quite a
hefty MCU which has received considerable interest by the robotic community.
Control » Servos » SOR_Axon
The SOR_Axon provides a module interface to the Axon MCU created and sold by the folks
over at Society of Robots.
With 55+ I/O channels, 16 analog ports, 3 UARTs, and 16 MIPS ATmega640 throughput at 16 MHz it's quite a
hefty MCU which has received considerable interest by the robotic community.
Feb 10, 2009 - Modules - ![]() Transform » Transform Image
It is not always possible to position a camera just right such that the scene under investigation
is appropriate for analysis. The Transform Image module provides a more comprehensive way to transform
an image using a homogenous matrix into a desired rotation, scale, etc. The Transform Image module
allows for rotation in the X and Y plane as most images in robotics do come from a 3D World. The
parameterized values that represent the homogenous matrix are also kept up to sync as best as possible
so if you've every wondered what each value in a homogenous matrix actually does to an image ... you can finally
find that out!
Transform » Transform Image
It is not always possible to position a camera just right such that the scene under investigation
is appropriate for analysis. The Transform Image module provides a more comprehensive way to transform
an image using a homogenous matrix into a desired rotation, scale, etc. The Transform Image module
allows for rotation in the X and Y plane as most images in robotics do come from a 3D World. The
parameterized values that represent the homogenous matrix are also kept up to sync as best as possible
so if you've every wondered what each value in a homogenous matrix actually does to an image ... you can finally
find that out!
Feb 5, 2009 - Modules -  Control » Other » USB-UIRT
One of the biggest issues with Roboticists is being able to control hardware devices
under computer control. Many IR devices are not applicable to control
from a PC since they do not provide any means of communication to a PC. That's where
the USB-UIRT becomes valuable. The USB-UIRT is an IR recording and
playback device that allows you to record any IR signal from a remote that can then be played
back to control the hardware device. The USB-UIRT plugs into your computer using a USB cable and
now with the new USB-UIRT module in RoboRealm can be controlled within your robotic
machine vision projects!
Control » Other » USB-UIRT
One of the biggest issues with Roboticists is being able to control hardware devices
under computer control. Many IR devices are not applicable to control
from a PC since they do not provide any means of communication to a PC. That's where
the USB-UIRT becomes valuable. The USB-UIRT is an IR recording and
playback device that allows you to record any IR signal from a remote that can then be played
back to control the hardware device. The USB-UIRT plugs into your computer using a USB cable and
now with the new USB-UIRT module in RoboRealm can be controlled within your robotic
machine vision projects!
Feb 5, 2009 - Modules -  Colors » Lab_Channel
The Lab_Channel module has been added to provide conversion to and from the RGB color space
to the CIE-Lab color space.
Colors » Lab_Channel
The Lab_Channel module has been added to provide conversion to and from the RGB color space
to the CIE-Lab color space.
Feb 4, 2009 - API -  MATLAB API
MATLAB is a powerful numerical processing application. By popular request we have
just released an example of how to integrate MATLAB and RoboRealm through the use
of MATLAB's Mex programming. You can now access both images and variables in RoboRealm
from MATLAB. The example DLL along with the source to the Mex file is
now included in the RoboRealm API download.
MATLAB API
MATLAB is a powerful numerical processing application. By popular request we have
just released an example of how to integrate MATLAB and RoboRealm through the use
of MATLAB's Mex programming. You can now access both images and variables in RoboRealm
from MATLAB. The example DLL along with the source to the Mex file is
now included in the RoboRealm API download.
Jan 15, 2009 - Modules -  Transform » Orient Image
Rotation of an image is often undesirable when attempting to match the image against a known database
or for further processing. The Orient Image module provides a way to orient an image into a canonical
orientation. Note that not all images have an intrinsic orientation and thus some will be
unstable when determining this standard orientation. Nevertheless, for images that contain a large
amount of straight lines (such as images of doorways, furniture, etc.) this module is yet another
way of orientating the image for further processing. One should note that many human man scenes exhibit
a large degree of vertical lines (buildings, doorways, rooftops, windows, etc.) that can be used
to determine the orientation of the image. The Orient Image module can determine to a limited degree
if a photo is in landscape or portrait view based on this principal.
Transform » Orient Image
Rotation of an image is often undesirable when attempting to match the image against a known database
or for further processing. The Orient Image module provides a way to orient an image into a canonical
orientation. Note that not all images have an intrinsic orientation and thus some will be
unstable when determining this standard orientation. Nevertheless, for images that contain a large
amount of straight lines (such as images of doorways, furniture, etc.) this module is yet another
way of orientating the image for further processing. One should note that many human man scenes exhibit
a large degree of vertical lines (buildings, doorways, rooftops, windows, etc.) that can be used
to determine the orientation of the image. The Orient Image module can determine to a limited degree
if a photo is in landscape or portrait view based on this principal.
Jan 9, 2009 - Modules -  Robots » WowWee Rovio
Joining the Spykee, the Rovio module adds another robotic webcam under the control
of RoboRealm. Like the Spykee robot the Rovio sends images over 802.11 (WiFi) to a PC running RoboRealm.
With the omnidirectional wheels the Rovio adds an interesting twist to
moving the robot around as you can now move in any direction you want. Keep in mind that the
Rovio's camera appears to need quite a bit of light so be sure to keep that in mind when
using this platform. Which one do we like better between the Rovio and the Spykee? That's something
you'll have to found out for yourselves as each has some advantages in certain situations.
As in most cases the nature of your project will favor one robot over the other.
Robots » WowWee Rovio
Joining the Spykee, the Rovio module adds another robotic webcam under the control
of RoboRealm. Like the Spykee robot the Rovio sends images over 802.11 (WiFi) to a PC running RoboRealm.
With the omnidirectional wheels the Rovio adds an interesting twist to
moving the robot around as you can now move in any direction you want. Keep in mind that the
Rovio's camera appears to need quite a bit of light so be sure to keep that in mind when
using this platform. Which one do we like better between the Rovio and the Spykee? That's something
you'll have to found out for yourselves as each has some advantages in certain situations.
As in most cases the nature of your project will favor one robot over the other.
Jan 1, 2009 -  Welcome to the new year! We're excited about the possibilities of what this new year will bring in terms of
new technology and innovation in a time where the world really needs hope for the future. To support our
continuing efforts to provide robotic machine vision software we're undergoing
some license changes for commercial users. To mark the addition of a $499.00 fee for commercial users
we are updating the application version to 2.0 to mark this event. Please note that this fee is only required
for commercial users. We look forward
to providing you with many more amazing modules in the coming year. Happy new year!
Welcome to the new year! We're excited about the possibilities of what this new year will bring in terms of
new technology and innovation in a time where the world really needs hope for the future. To support our
continuing efforts to provide robotic machine vision software we're undergoing
some license changes for commercial users. To mark the addition of a $499.00 fee for commercial users
we are updating the application version to 2.0 to mark this event. Please note that this fee is only required
for commercial users. We look forward
to providing you with many more amazing modules in the coming year. Happy new year!
Dec 28, 2008 - Modules -  Robots » Erector Spykee
The Spykee module provides an interface from RoboRealm to the Erector Spykee robot. Using the
module you can command the robot
to respond to images processed from the Spykee robot. The robot sends images over
802.11 (WiFi) to a PC running RoboRealm which provides a great mobile robot vision platform.
Robots » Erector Spykee
The Spykee module provides an interface from RoboRealm to the Erector Spykee robot. Using the
module you can command the robot
to respond to images processed from the Spykee robot. The robot sends images over
802.11 (WiFi) to a PC running RoboRealm which provides a great mobile robot vision platform.
Dec 05, 2008 - User Projects -  Owen Sound Real-time Weather Conditions - This is, perhaps, the only autonomous real-time snow gauge currently
operating on the internet. It employs a Linksys WVC200 network camera pointed at a length
of 2�-inch PVC pipe painted fluorescent orange. The pipe is held upright by an outdoor
umbrella stand with its sleeve painted orange to match the PVC pipe.
Owen Sound Real-time Weather Conditions - This is, perhaps, the only autonomous real-time snow gauge currently
operating on the internet. It employs a Linksys WVC200 network camera pointed at a length
of 2�-inch PVC pipe painted fluorescent orange. The pipe is held upright by an outdoor
umbrella stand with its sleeve painted orange to match the PVC pipe.
Nov 25, 2008 - Tutorial -  The Lego PC Bot
tutorial shows how to use machine vision onboard a Lego NXT based PC robot. The robot can move around a
carpeted environment using a camera to determine the difference between the carpet and obstacles.
The Lego PC Bot
tutorial shows how to use machine vision onboard a Lego NXT based PC robot. The robot can move around a
carpeted environment using a camera to determine the difference between the carpet and obstacles.
Nov 21, 2008 - Tutorial -  The Obstacle Avoidance
tutorial shows how to use machine vision to avoid objects that are within the camera's view.
The tutorial starts off with some basic techniques that are easy to understand and can be used around the
home environment followed by more advanced techniques that are more generally applicable.
The Obstacle Avoidance
tutorial shows how to use machine vision to avoid objects that are within the camera's view.
The tutorial starts off with some basic techniques that are easy to understand and can be used around the
home environment followed by more advanced techniques that are more generally applicable.
Nov 10, 2008 - Link -  Q&A with RoboRealm
Want to know more about RoboRealm? Check out the
"Machine Vision 4 Users" blog where Steven answers a couple questions
posed by Brian about RoboRealm and machine vision in general.
Q&A with RoboRealm
Want to know more about RoboRealm? Check out the
"Machine Vision 4 Users" blog where Steven answers a couple questions
posed by Brian about RoboRealm and machine vision in general.
Oct 16, 2008 - Link -  RoboDevelopment - Visual Obstacle Avoidance
If you're in the San Francisco area next month be sure to stop by the
RoboDevelopment conference in San Jose where Steven will be giving a talk on
how to use machine vision on mobile robots for obstacle avoidance and navigation. The talk will use
RoboRealm running on mobile PC based robots to demonstrate several techniques that you can try
in your own projects! This should be a great show and we're very excited about being a part of presenting at
RoboDevelopment.
RoboDevelopment - Visual Obstacle Avoidance
If you're in the San Francisco area next month be sure to stop by the
RoboDevelopment conference in San Jose where Steven will be giving a talk on
how to use machine vision on mobile robots for obstacle avoidance and navigation. The talk will use
RoboRealm running on mobile PC based robots to demonstrate several techniques that you can try
in your own projects! This should be a great show and we're very excited about being a part of presenting at
RoboDevelopment.
Oct 16, 2008 - Module -  Colors » Segment Colors
The Segment Colors module is functionally similar to the Flood Fill module but provides more stable blobs when viewed
as video and is also a faster module than the flood fill. The purpose behind both the Segment Colors and Flood Fill module
is to reduce the image into collections of pixels called blobs that can be further processed based on shape, size, etc. by
the Blob Filter or other such modules.
Colors » Segment Colors
The Segment Colors module is functionally similar to the Flood Fill module but provides more stable blobs when viewed
as video and is also a faster module than the flood fill. The purpose behind both the Segment Colors and Flood Fill module
is to reduce the image into collections of pixels called blobs that can be further processed based on shape, size, etc. by
the Blob Filter or other such modules.
Oct 15, 2008 - Module -  Transforms » Optical Flow
Optical flow is a great tool to investigate the motion of objects. While it has its limitations
Optical flow can be used for motion segmentation, object detection, and object tracking.
Transforms » Optical Flow
Optical flow is a great tool to investigate the motion of objects. While it has its limitations
Optical flow can be used for motion segmentation, object detection, and object tracking.
Oct 15, 2008 - Module -  Other » Laser Line
Lasers are just plain fun! They are also useful for robots using machine vision to
actively modify the environment in a way that is easier to sample and understand. The Laser Line
module does exactly that by detecting a red laser line in from of the robot in order
to avoid obstacles in its path. Combined with the Laser Spot detector
RoboRealm now has some straightforward ways to start using lasers in your next project.
But be careful, lasers can be harmful to your eyes!
Other » Laser Line
Lasers are just plain fun! They are also useful for robots using machine vision to
actively modify the environment in a way that is easier to sample and understand. The Laser Line
module does exactly that by detecting a red laser line in from of the robot in order
to avoid obstacles in its path. Combined with the Laser Spot detector
RoboRealm now has some straightforward ways to start using lasers in your next project.
But be careful, lasers can be harmful to your eyes!
Sept 19, 2008 - Tutorial -  Tutorial » Marble Maze
The Marble Maze tutorial shows how to use image processing and custom path planning to
solve rolling a marble from a start point to and end point within the maze.
Tutorial » Marble Maze
The Marble Maze tutorial shows how to use image processing and custom path planning to
solve rolling a marble from a start point to and end point within the maze.
Sept 09, 2008 - Module - Loading/Saving » Ftp Images
The Ftp Images module provides a way to transmit images from RoboRealm to an FTP server. This
module can be used to update remote sites with images based on a specific frequency or time
criteria.
Sept 09, 2008 - Module - ![]() Transforms » Bottle Unwrap
The Bottle Unwrap module transforms an image that is wrapped around a bottle surface into a flat surface. This module
is often used as a precursor to an OCR module in order to correct for curve distortion when imaging a curved
surface.
Transforms » Bottle Unwrap
The Bottle Unwrap module transforms an image that is wrapped around a bottle surface into a flat surface. This module
is often used as a precursor to an OCR module in order to correct for curve distortion when imaging a curved
surface.
Sept 09, 2008 - Module - Extensions » Modbus
The Modbus protocol is a well established simple data transmission
protocol often used to transmit signals between PCs and PLC type devices. The Modbus slave module accepts
modbus master requests over TCP/IP and provides a way for PLC modbus compliant devices to access RoboRealm
variables.
June 09, 2008 - Module -  Control » Servos » Endurance Servo
The Endurance Servo module allows you to interface RoboRealm to servos using a controller made by Endurance R/C
The USB based servo controller supports up to 25 servos and provides for an external servo power supply in
order to run 5v, 6v, or 9v servos.
Control » Servos » Endurance Servo
The Endurance Servo module allows you to interface RoboRealm to servos using a controller made by Endurance R/C
The USB based servo controller supports up to 25 servos and provides for an external servo power supply in
order to run 5v, 6v, or 9v servos.
June 09, 2008 - Module -  Interface » Keyboard Send
The Keyboard Send module creates a way to simulate keypresses as if you were typing into a
different application other than RoboRealm. This method provides a way to integrate the
results processed by RoboRealm into other applications without requiring any custom integration
between the two applications.
Interface » Keyboard Send
The Keyboard Send module creates a way to simulate keypresses as if you were typing into a
different application other than RoboRealm. This method provides a way to integrate the
results processed by RoboRealm into other applications without requiring any custom integration
between the two applications.
June 09, 2008 - Module -  Loading/Saving » Screen Capture
The screen capture module provides you with the ability to capture the video output of
any application that
has a display on your computer screen and process that output within RoboRealm as if it
were just another webcam video stream. For example, the
very popular virtual environment Second Life can be used as a simulator to test out computer
vision algorithms without needing a robot or scenery to physically exist.
Loading/Saving » Screen Capture
The screen capture module provides you with the ability to capture the video output of
any application that
has a display on your computer screen and process that output within RoboRealm as if it
were just another webcam video stream. For example, the
very popular virtual environment Second Life can be used as a simulator to test out computer
vision algorithms without needing a robot or scenery to physically exist.
June 03, 2008 - Module -  Transforms » Perspective
The Perspective Correction module provides an image transform that corrects for
the effects of perspective depth. Perspective will distort objects to appear larger
the closer they are to the
camera source and smaller when further away.
Transforms » Perspective
The Perspective Correction module provides an image transform that corrects for
the effects of perspective depth. Perspective will distort objects to appear larger
the closer they are to the
camera source and smaller when further away.
May 20, 2008 - Module -  Control » Cameras » TRENDnet Internet Camera
The TRENDnet Internet Camera module provides access to the TRENDnet cameras that stream video over the internet.
Check out the office camera that TRENDnet has as a demo to see the camera in action.
Control » Cameras » TRENDnet Internet Camera
The TRENDnet Internet Camera module provides access to the TRENDnet cameras that stream video over the internet.
Check out the office camera that TRENDnet has as a demo to see the camera in action.
Link - Maker Faire -
RoboRealm is used in many ways; from robot navigation to art exhibits to quality assurance on pieces of bread!
Come join us in celebrating this immense diversity at the "Do-It-Yourself" Maker Faire on May 4th & 5th in San Francisco and see what
ideas you can create! We're in the main Expo hall and will be ready to answer your questions.
Apr 3, 2008 - Module -  Filters » Flatten
In the constant struggle against bad lighting the flatten module helps to even out lighting across the image. This
is akin to an edge detection but one that preserves the finer elements of the image in order to create a more
visually recognizable image in contrast to a pure edge detection. The flatten module is useful in reducing the
effects of shadows and highlights.
Filters » Flatten
In the constant struggle against bad lighting the flatten module helps to even out lighting across the image. This
is akin to an edge detection but one that preserves the finer elements of the image in order to create a more
visually recognizable image in contrast to a pure edge detection. The flatten module is useful in reducing the
effects of shadows and highlights.
Apr 3, 2008 - Module - Extensions » OSC_Send_Variables
Adding yet another way for RoboRealm to communicate with other applications opens up applications that understand
the OSC protocol. This protocol is most often used in Music type applications to communicate bits of status information
from one device or application to another.
Apr 3, 2008 - Module -  Control » Other » LED_Wiz
Because you always want to control more LEDs the LED-Wiz module provides an interface to the IDVT LED-Wiz controller board. This device
allows your robot projects to express themselves better by putting on their own LED light show!
Control » Other » LED_Wiz
Because you always want to control more LEDs the LED-Wiz module provides an interface to the IDVT LED-Wiz controller board. This device
allows your robot projects to express themselves better by putting on their own LED light show!
Mar 17, 2008 - Module -  Other » 3D Viewer
Robots often need to understand the 3D world around them. In order to help us get a better understanding of the
possibilities of 3D the 3D Viewer module provides a way to experience 3D images from your computer. This is a first
step into stereoscopic vision that helps you understand the limitations and setup of a stereo based camera system.
Other » 3D Viewer
Robots often need to understand the 3D world around them. In order to help us get a better understanding of the
possibilities of 3D the 3D Viewer module provides a way to experience 3D images from your computer. This is a first
step into stereoscopic vision that helps you understand the limitations and setup of a stereo based camera system.
Mar 17, 2008 - Module -  Blobs » Blob Colorize
Often during processing of images a segmented blob needs to regain its original color to allow for further processing
based on an average or mean color that best represents the blob. The Blob Colorize does just that.
Blobs » Blob Colorize
Often during processing of images a segmented blob needs to regain its original color to allow for further processing
based on an average or mean color that best represents the blob. The Blob Colorize does just that.
Mar 17, 2008 - Module -  Point Features » Point Cloud
Many robotic sensors provide a wide range of single point samples for the area they are sensing. Such devices
include LIDAR or Sonar type systems. Whilst very different in origin from color pixel values they can be
processed in fundamentally the same way as camera pixels. The Point Cloud module provides a way to create a graphic image
of your point samples which then allows all other RoboRealm modules to process that data as if it were a graphic image
captured from a webcam.
Point Features » Point Cloud
Many robotic sensors provide a wide range of single point samples for the area they are sensing. Such devices
include LIDAR or Sonar type systems. Whilst very different in origin from color pixel values they can be
processed in fundamentally the same way as camera pixels. The Point Cloud module provides a way to create a graphic image
of your point samples which then allows all other RoboRealm modules to process that data as if it were a graphic image
captured from a webcam.
Mar 17, 2008 - Module -  Loading/Saving » Read Variables
Adding yet another way to read information back into RoboRealm, the Read Variables module provides a way to
read in configuration information or data points from text files into RoboRealm for further processing or
module configuration.
Loading/Saving » Read Variables
Adding yet another way to read information back into RoboRealm, the Read Variables module provides a way to
read in configuration information or data points from text files into RoboRealm for further processing or
module configuration.
Mar 12, 2008 - Module -  Adjust » Camera Properties (DirectX)
A lot can be done to digitally correct images with bad lighting, contrast, etc. but nothing beats having the camera change its internal
capture configuration to yield a better image. The Camera Properties module provides a way to change the internal DirectX supported camera properties
using RoboRealm variables instead of having to manually pull up the camera capture dialog to change the capture parameters. In this way your
robot can better adapt how the camera should function in a particular circumstance.
Adjust » Camera Properties (DirectX)
A lot can be done to digitally correct images with bad lighting, contrast, etc. but nothing beats having the camera change its internal
capture configuration to yield a better image. The Camera Properties module provides a way to change the internal DirectX supported camera properties
using RoboRealm variables instead of having to manually pull up the camera capture dialog to change the capture parameters. In this way your
robot can better adapt how the camera should function in a particular circumstance.
Mar 10, 2008 - Module -  Control » Robot » IRobot Roomba
If you are interested in extending the capability of your IRobot Roomba vacuum then have a look at the RoboRealm Roomba control module for both the
400 and 500 Roomba robot series. This module
allows you to control your vacuum to be more than just a vacuum. By adding an onboard camera or even using a stationary one you could provide
better navigation for your Roomba by using the processing power of your PC.
Control » Robot » IRobot Roomba
If you are interested in extending the capability of your IRobot Roomba vacuum then have a look at the RoboRealm Roomba control module for both the
400 and 500 Roomba robot series. This module
allows you to control your vacuum to be more than just a vacuum. By adding an onboard camera or even using a stationary one you could provide
better navigation for your Roomba by using the processing power of your PC.
Feb 18, 2008 - Module - ![]() Control » Other » USB HID Interface
With the popularity of the serial module that allows creation of custom communication protocols to certain devices the
USB HID module provides a similar amount of flexible control of USB devices that utilize the Human Interface Device
standard of communication. This style of device driver is often used in popular desktop products such as the Dream Cheeky
USB Missile Launcher (of which we already have a module). The USB HID module gives you the ability to communicate to
these types of devices which RoboRealm has not yet had a chance to create a custom module for or is simply unaware of.
Control » Other » USB HID Interface
With the popularity of the serial module that allows creation of custom communication protocols to certain devices the
USB HID module provides a similar amount of flexible control of USB devices that utilize the Human Interface Device
standard of communication. This style of device driver is often used in popular desktop products such as the Dream Cheeky
USB Missile Launcher (of which we already have a module). The USB HID module gives you the ability to communicate to
these types of devices which RoboRealm has not yet had a chance to create a custom module for or is simply unaware of.
Feb 11, 2008 - Interface - Options » Kiosk Mode
As more and more of you are using RoboRealm in live settings to control your robot we are happy to announce the availability
of a Kiosk mode. The Kiosk mode is meant to help you reduce the RoboRealm interface to the bare minimum to prevent accidental
reconfiguration of the currently running RoboRealm application. Using the Kiosk mode you can lock the RoboRealm
application into a reduced interface to ensure simpler user operation.
Feb 11, 2008 - Module -  Display » Display Triangle, Circle and Rectangle modules were added to provide you the ability to draw those shapes
based on coordinates within RoboRealm. While very basic these modules are very useful in cleaning up shapes by redrawing
them based just on their appropriate coordinates.
Display » Display Triangle, Circle and Rectangle modules were added to provide you the ability to draw those shapes
based on coordinates within RoboRealm. While very basic these modules are very useful in cleaning up shapes by redrawing
them based just on their appropriate coordinates.
Feb 11, 2008 - Module -  Control » Cameras » Firewire (The Imaging Source)
RoboRealm continues its camera integrations by welcoming The Imaging Source as a
new RoboRealm partner. Their gracious loan of a DBX-21BF04-Z firewire camera has
allowed the creation of a new Firewire camera module that allows the RoboRealm application
to be used with firewire cameras such as those provided by The Imaging Source.
Control » Cameras » Firewire (The Imaging Source)
RoboRealm continues its camera integrations by welcoming The Imaging Source as a
new RoboRealm partner. Their gracious loan of a DBX-21BF04-Z firewire camera has
allowed the creation of a new Firewire camera module that allows the RoboRealm application
to be used with firewire cameras such as those provided by The Imaging Source.
Feb 11, 2008 - Tutorial -  Matching » Shape Matching
tutorial using the DBX-21BF04-Z camera for part identification as objects move along a conveyor belt.
Matching » Shape Matching
tutorial using the DBX-21BF04-Z camera for part identification as objects move along a conveyor belt.
Jan 11, 2008 -  profmason.com
In a fashion that continues to amaze us, profmason continues to create truly inspiring vision based projects. Check out the
integration of RoboRealm and the VexExplorer for can grabbing in Integrating the VEXplorer with Roborealm with a video of the robot in
action. More how he hooked up the robot under PC control in Programming VEXplorer for Computer control and Decoding VExplorer Remote.
This isn't the only robot to fall under his oscilloscope. The RoboSapien also fell
prey at 39.2 KHz signal modulated at 1200baud for Robosapien with some final usage with RoboRealm
in Controlling Robosapien from Roborealm.
Likewise with the RoboQuad in Voice Controlled RoboQuad.
Naturally with all these robots you do need quite a bit of power to keep them running. No worries,
in Using Roborealm to identify a power outlet the robots
can now find it themselves! If you want to check out all his projects in one shot have a
look at his Robotics category and see if you
agree with us that he just doesn't sleep!
profmason.com
In a fashion that continues to amaze us, profmason continues to create truly inspiring vision based projects. Check out the
integration of RoboRealm and the VexExplorer for can grabbing in Integrating the VEXplorer with Roborealm with a video of the robot in
action. More how he hooked up the robot under PC control in Programming VEXplorer for Computer control and Decoding VExplorer Remote.
This isn't the only robot to fall under his oscilloscope. The RoboSapien also fell
prey at 39.2 KHz signal modulated at 1200baud for Robosapien with some final usage with RoboRealm
in Controlling Robosapien from Roborealm.
Likewise with the RoboQuad in Voice Controlled RoboQuad.
Naturally with all these robots you do need quite a bit of power to keep them running. No worries,
in Using Roborealm to identify a power outlet the robots
can now find it themselves! If you want to check out all his projects in one shot have a
look at his Robotics category and see if you
agree with us that he just doesn't sleep!
Dec 3, 2007 -  Control » Other » DC Car
- The DC Car module provides control over the
Dream Cheeky USB Car. The Dream Cheeky USB Car is an inexpensive device that is controlled by your
computer. The DC Car module allows RoboRealm to automatically control the movement of the car using
an overhead camera or a very small camera attached to the car. The USB Car is a fun
way to get started with controlling devices using vision.
Control » Other » DC Car
- The DC Car module provides control over the
Dream Cheeky USB Car. The Dream Cheeky USB Car is an inexpensive device that is controlled by your
computer. The DC Car module allows RoboRealm to automatically control the movement of the car using
an overhead camera or a very small camera attached to the car. The USB Car is a fun
way to get started with controlling devices using vision.
Nov 26, 2007 -  Colors » Color Balance
- Processing images for color is one of the easiest ways to identify an object within an image. However,
color is never constant and can change drastically based on the illumination (sunshine, incandescent bulb, etc.)
and even on the type of camera used. In an effort to reduce these effects the Color Balance module
was added to provide you both a manual and automatic way of adjusting the overall colors within an image.
If you're trying to detect color be sure to try the automatic mode of the Color Balancer which may
help your values to be more consistent from frame to frame.
Colors » Color Balance
- Processing images for color is one of the easiest ways to identify an object within an image. However,
color is never constant and can change drastically based on the illumination (sunshine, incandescent bulb, etc.)
and even on the type of camera used. In an effort to reduce these effects the Color Balance module
was added to provide you both a manual and automatic way of adjusting the overall colors within an image.
If you're trying to detect color be sure to try the automatic mode of the Color Balancer which may
help your values to be more consistent from frame to frame.
Nov 26, 2007 -  Loading/Saving » Email
- Email has become one of the most prominent and popular forms of communication in the Internet
lifestyle today. Leveraging this communication, the new
Email module allows you to send an email from RoboRealm that contains both text and an image. See
the example in the notes to learn how you can create a configuration that emails you once movement
is detected. Now you can be even more informed by receiving emails that contain processed
images from RoboRealm.
Loading/Saving » Email
- Email has become one of the most prominent and popular forms of communication in the Internet
lifestyle today. Leveraging this communication, the new
Email module allows you to send an email from RoboRealm that contains both text and an image. See
the example in the notes to learn how you can create a configuration that emails you once movement
is detected. Now you can be even more informed by receiving emails that contain processed
images from RoboRealm.
Nov 18, 2007 -  Control » Robots » Surveyor SRV1 Blackfin
- The newest 802.11 Blackfin based Surveyor Robot is now out and RoboRealm
is very pleased to announce a new module that supports that new robot configuration. With increased
wireless speed using 802.11 and sporting the powerful Blackfin DSP onboard processor the SRV-1b is one of the nicest
robots to use for your vision related experiments. A special thanks to the folks at Surveyor for getting us
the very first production version of the SRV-1b for use at the RoboDevelopment show and for testing the
new RoboRealm module.
Control » Robots » Surveyor SRV1 Blackfin
- The newest 802.11 Blackfin based Surveyor Robot is now out and RoboRealm
is very pleased to announce a new module that supports that new robot configuration. With increased
wireless speed using 802.11 and sporting the powerful Blackfin DSP onboard processor the SRV-1b is one of the nicest
robots to use for your vision related experiments. A special thanks to the folks at Surveyor for getting us
the very first production version of the SRV-1b for use at the RoboDevelopment show and for testing the
new RoboRealm module.
Nov 18, 2007 -  Tutorial » Trail Follower
- This tutorial shows you how to make the Surveyor robot following a trail of orange squares. The goal
of this tutorial is introduce different techniques for segmenting/identifying
orange squares in a variety of lighting conditions. The robot should follow the trail and turn
around to continue back over the trail looping from end to end. Note that no encoders or other sensors other than
vision are used in this scenario. This tutorial also introduces the newest release of the Surveyor SRV1b that uses
the Blackfin DSP and 802.11 wireless connectivity.
Tutorial » Trail Follower
- This tutorial shows you how to make the Surveyor robot following a trail of orange squares. The goal
of this tutorial is introduce different techniques for segmenting/identifying
orange squares in a variety of lighting conditions. The robot should follow the trail and turn
around to continue back over the trail looping from end to end. Note that no encoders or other sensors other than
vision are used in this scenario. This tutorial also introduces the newest release of the Surveyor SRV1b that uses
the Blackfin DSP and 802.11 wireless connectivity.
Nov 18, 2007 -  Tutorial » Digital Reader
- This tutorial shows you how to read information from your temperature gauge, water heater,
barbecue temperature, coke machine, laundry timer, etc. from your PC. While most modern
sensors today have the ability to interface to PC based systems at lot of older devices
do not. They do, however, offer a digital display that can be read by humans. You can
use RoboRealm to read these digits from those devices and use that information in
new ways on your PC.
Tutorial » Digital Reader
- This tutorial shows you how to read information from your temperature gauge, water heater,
barbecue temperature, coke machine, laundry timer, etc. from your PC. While most modern
sensors today have the ability to interface to PC based systems at lot of older devices
do not. They do, however, offer a digital display that can be read by humans. You can
use RoboRealm to read these digits from those devices and use that information in
new ways on your PC.
Nov 18, 2007 -  Transforms » Polar Transform
- Joining the updated Radial Transform the Polar Transform
adds additional capabilities when using omnidirectional 360 panoramic type cameras in unwrapping the
images into something more consumable by us and by standard vision algorithms. Using omnidirectional
cameras a robot can instantaneously capture images in all directions which is a requirement for
situations where fast moving objects like soccer balls need to be tracked.
Transforms » Polar Transform
- Joining the updated Radial Transform the Polar Transform
adds additional capabilities when using omnidirectional 360 panoramic type cameras in unwrapping the
images into something more consumable by us and by standard vision algorithms. Using omnidirectional
cameras a robot can instantaneously capture images in all directions which is a requirement for
situations where fast moving objects like soccer balls need to be tracked.
Nov 01, 2007 -  Filters » Bayer Filter
- For those of you using a Bayer CCD camera the Bayer module will demosaic the pixel values into an RGB
color approximation.
Filters » Bayer Filter
- For those of you using a Bayer CCD camera the Bayer module will demosaic the pixel values into an RGB
color approximation.
Oct 16, 2007 -  Other » Path Planning
- The Path Planning module is used with an overhead camera looking down at an arena to control a robot
along a path designated by waypoints. Be sure to check out our new Path Planning Tutorial
to see how the Boe-Bot is controlled along a path.
Other » Path Planning
- The Path Planning module is used with an overhead camera looking down at an arena to control a robot
along a path designated by waypoints. Be sure to check out our new Path Planning Tutorial
to see how the Boe-Bot is controlled along a path.
Oct 16, 2007 -  Interface » Button Interface
- The Button Interface module provides a quick way to create a simple GUI interface that links a couple buttons
to RoboRealm variables. It is a great way to control your robot using custom buttons.
Interface » Button Interface
- The Button Interface module provides a quick way to create a simple GUI interface that links a couple buttons
to RoboRealm variables. It is a great way to control your robot using custom buttons.
Oct 16, 2007 - Delta Frequency - The Delta Frequency module provides a way to detect oscillating objects at a specified frequency. For example, waving at your computer's camera is one such an action.
Oct 15, 2007 -  Virtual Camera Driver
- In our continued efforts to provide additional integration points with other applications we now
introduce the RoboRealm Virtual Camera Driver. The VCam driver allows other applications that manipulate or analyze
images to access the processed results of RoboRealm as if RoboRealm were just another webcam in your system.
The VCam driver adds a new Video Capture device to your system that RoboRealm will update as it processes images.
You can also use the VCam driver to provide the webcam source image to another application to process.
This allows more than one application to access a webcam's image in succession.
Virtual Camera Driver
- In our continued efforts to provide additional integration points with other applications we now
introduce the RoboRealm Virtual Camera Driver. The VCam driver allows other applications that manipulate or analyze
images to access the processed results of RoboRealm as if RoboRealm were just another webcam in your system.
The VCam driver adds a new Video Capture device to your system that RoboRealm will update as it processes images.
You can also use the VCam driver to provide the webcam source image to another application to process.
This allows more than one application to access a webcam's image in succession.
Sep 24, 2007 -  RoboDevelopment
- Thanks to the helpful folks over at RoboDevelopment we will be exhibiting at that show in San Jose on Oct 25 & 26th. Come see us
at booth #114. Should be a fun show!
RoboDevelopment
- Thanks to the helpful folks over at RoboDevelopment we will be exhibiting at that show in San Jose on Oct 25 & 26th. Come see us
at booth #114. Should be a fun show!
Sep 24, 2007 - New user interface parts added to the main RoboRealm interface including an index tab and
search tab to better help you find modules you need.
Sep 10, 2007 -  Colors » Sample Color
- The Sample Color module provides a way to compare a specific image area with known colors to determine which
color is most representative of the area. The module performs an averaging over the specified image area
and compares this resulting value with color values entered into the Nearest Color list.
Colors » Sample Color
- The Sample Color module provides a way to compare a specific image area with known colors to determine which
color is most representative of the area. The module performs an averaging over the specified image area
and compares this resulting value with color values entered into the Nearest Color list.
Sep 10, 2007 -  Edges » Edge Probe
- The Edge Probe module provides a way to detect edges along a specified path. The
path is a single line that you can manually place on the image or control the position
using variables.
Edges » Edge Probe
- The Edge Probe module provides a way to detect edges along a specified path. The
path is a single line that you can manually place on the image or control the position
using variables.
Aug 20, 2007 -  Point Features » Vanishing Point
- Vanishing points are wonderful side effects of depth that robots can use to guide them
down hallways. The Vanishing Point module identifies the vanishing point location within
the current image and provides you a way to control devices with respect to that point.
Point Features » Vanishing Point
- Vanishing points are wonderful side effects of depth that robots can use to guide them
down hallways. The Vanishing Point module identifies the vanishing point location within
the current image and provides you a way to control devices with respect to that point.
Aug 20, 2007 -  Edges » Straight Line
- The Straight Line module identifies straight lines within the image. Using edge
contours the module can merge line segments into straight line much faster than the
Hough transform. In addition, filters for the slope, size and proximity
provide better control over filtering lines within images.
Edges » Straight Line
- The Straight Line module identifies straight lines within the image. Using edge
contours the module can merge line segments into straight line much faster than the
Hough transform. In addition, filters for the slope, size and proximity
provide better control over filtering lines within images.
Aug 20, 2007 -  Point Features » Line Corner
- The Line Corner module identifies corners based on an edge detected image. Using contours
to guide its search the module identifies corners created by line intersections to
identify corners that may not actually exist but are implied from line segments.
Point Features » Line Corner
- The Line Corner module identifies corners based on an edge detected image. Using contours
to guide its search the module identifies corners created by line intersections to
identify corners that may not actually exist but are implied from line segments.
Aug 20, 2007 -  Point Features » Ring Corner
- Similar to Edward Rosten's FAST corner detector
the ring corner detector module provides another way to identify corners.
Corners are great features to detect as they are scale, translation and rotationally
invariant which hopefully make them more repeatable in successive frames.
Point Features » Ring Corner
- Similar to Edward Rosten's FAST corner detector
the ring corner detector module provides another way to identify corners.
Corners are great features to detect as they are scale, translation and rotationally
invariant which hopefully make them more repeatable in successive frames.
Aug 07, 2007 -  Transforms » Visual Anchor
- In RoboRealm's continued investigation of image stabilization the Visual Anchor module has been added.
This module allows a robot to know how far it has moved with regards to a known scene. This module
uses a technique classified under Visual Odometry. Visual odometry uses vision to calculate
how far you have traveled instead of using encoders. This has the advantage of being more accurate
in situations where wheel slippage is expected (such as traveling on the sandy Martian surface!).
Transforms » Visual Anchor
- In RoboRealm's continued investigation of image stabilization the Visual Anchor module has been added.
This module allows a robot to know how far it has moved with regards to a known scene. This module
uses a technique classified under Visual Odometry. Visual odometry uses vision to calculate
how far you have traveled instead of using encoders. This has the advantage of being more accurate
in situations where wheel slippage is expected (such as traveling on the sandy Martian surface!).
Aug 07, 2007 -  Point Features » Sample Line
- The Sample Line module does just what you would expect. Given one or more lines in a image it "samples" the
edge created by objects or edges. This line sampling can then be used to perform your own
analysis or saved to disk to be used by other applications.
Point Features » Sample Line
- The Sample Line module does just what you would expect. Given one or more lines in a image it "samples" the
edge created by objects or edges. This line sampling can then be used to perform your own
analysis or saved to disk to be used by other applications.
Jul 30, 2007 -  Control » Robots » RoboticsConnection Traxster Robot
- The RobConn_Traxster module provides an interface from RoboRealm to the
RoboticsConnection Traxster Robot.
The Traxster Robot Kit was designed to be used as an indoor educational robotics kit and works very
well over carpet using its injection molded tracks powered by two DC gear head motors. The kit provides
a lot of room ontop of the robot for enhancements such as pan/tilt head, cameras, and for additional
sensors such as infrared and sonar.
The RoboRealm RobConn_Traxster module provides an interface to the robot to provide control
of the robot based on machine vision.
Control » Robots » RoboticsConnection Traxster Robot
- The RobConn_Traxster module provides an interface from RoboRealm to the
RoboticsConnection Traxster Robot.
The Traxster Robot Kit was designed to be used as an indoor educational robotics kit and works very
well over carpet using its injection molded tracks powered by two DC gear head motors. The kit provides
a lot of room ontop of the robot for enhancements such as pan/tilt head, cameras, and for additional
sensors such as infrared and sonar.
The RoboRealm RobConn_Traxster module provides an interface to the robot to provide control
of the robot based on machine vision.
Jul 30, 2007 -  Transforms » Stabilize
- Video stabilization is an important part of video processing. Many routines require stationary cameras in order
work correctly. Knowing how the image has changed helps to understand how your robot may be moving. The video stabilization module
is the first in a line of visual odomotry modules that will allow your robot to better understand how
it is moving within the environment. The video stabilization module shows how to stabilize shaky video
and exposes those parameters as variables to be used in understanding the robots movement.
Transforms » Stabilize
- Video stabilization is an important part of video processing. Many routines require stationary cameras in order
work correctly. Knowing how the image has changed helps to understand how your robot may be moving. The video stabilization module
is the first in a line of visual odomotry modules that will allow your robot to better understand how
it is moving within the environment. The video stabilization module shows how to stabilize shaky video
and exposes those parameters as variables to be used in understanding the robots movement.
Jul 23, 2007 -  Control » Servos » Yost Engineering ServoCenter� 3.0
- The ServoCenter board provides for the control of up to 16 servos per board. Each board can be separately identified and
serially chained to
control up to a total of 256 servos. The ServoCenter offers seek speed and scaled resolution for each individual servo. This
allows you to move one servo to a position slowly, while another is moving to a different position at a faster speed.
Control » Servos » Yost Engineering ServoCenter� 3.0
- The ServoCenter board provides for the control of up to 16 servos per board. Each board can be separately identified and
serially chained to
control up to a total of 256 servos. The ServoCenter offers seek speed and scaled resolution for each individual servo. This
allows you to move one servo to a position slowly, while another is moving to a different position at a faster speed.
Jul 16, 2007 -  Control » Servos » Pololu SSC
- The Pololu Serial Servo Controller (SSC) provides great fine tune control
for up to 8 servo's per board. The Pololu SSC understands the Mini-SSC II protocol but adding
in the native protocol of the SSC provides better control over speed and resolution for your servos.
Control » Servos » Pololu SSC
- The Pololu Serial Servo Controller (SSC) provides great fine tune control
for up to 8 servo's per board. The Pololu SSC understands the Mini-SSC II protocol but adding
in the native protocol of the SSC provides better control over speed and resolution for your servos.
Jul 10, 2007 -  RoboRealm MSRS Simulation
- If you don't have a robot and want to experiment with vision processing RoboRealm now can be used
with the MSRS simulation package to process camera images generated by the simulation engine.
This is a great and fun way to experiment with vision routines without needing to have a physical
robot around.
RoboRealm MSRS Simulation
- If you don't have a robot and want to experiment with vision processing RoboRealm now can be used
with the MSRS simulation package to process camera images generated by the simulation engine.
This is a great and fun way to experiment with vision routines without needing to have a physical
robot around.
Jul 01, 2007 -  Control » Motors » Dimension Engineering Sabertooth
- RoboRealm is excited to announce our first DC motor controller module. The Dimension Engineering
Sabertooth module adds an interface to the Sabertooth
DC motor controller. The Sabertooth motor controller can handle two DC motors up to 5A per board
with a maximum of 8 boards per PC. This module allows you to control DC motors
from your PC via Serial or USB signals using the Sabertooth board.
Control » Motors » Dimension Engineering Sabertooth
- RoboRealm is excited to announce our first DC motor controller module. The Dimension Engineering
Sabertooth module adds an interface to the Sabertooth
DC motor controller. The Sabertooth motor controller can handle two DC motors up to 5A per board
with a maximum of 8 boards per PC. This module allows you to control DC motors
from your PC via Serial or USB signals using the Sabertooth board.
Jul 01, 2007 -  Histogram » Levels
- The Histogram Levels module provides a way to control the gamma and scaling of
color channels. This module will process each color channel to bend and scale
the color values into better visual results.
Histogram » Levels
- The Histogram Levels module provides a way to control the gamma and scaling of
color channels. This module will process each color channel to bend and scale
the color values into better visual results.
Jul 01, 2007 - MSRS 1.5
- The RoboRealm MSRS 1.5 interface has been updated with more routines to capture variables
from RoboRealm into the MSRS system. Have a look at the new MSRS 1.5 package that includes
a GetVariableExample orchestration program to help you incorporate RoboRealm
data into your MSRS orchestration applications.
Jul 01, 2007 -  Histogram » Exponential
- To counter the Logarithmic Histogram module arrives the Exponential Histogram module.
This allows you to convert an image to Logarithmic space, perform some filtering and
then restore the image to linear space using the Exponential Histogram.
Histogram » Exponential
- To counter the Logarithmic Histogram module arrives the Exponential Histogram module.
This allows you to convert an image to Logarithmic space, perform some filtering and
then restore the image to linear space using the Exponential Histogram.
Jul 01, 2007 -  Display » Display Line
- The Display_Line module provides a way to automatically draw lines from one point to
another. This is useful to better visualize what shape extracted points create. See
what we did using a laser pointer and the display_line module to connect the laser points.
Display » Display Line
- The Display_Line module provides a way to automatically draw lines from one point to
another. This is useful to better visualize what shape extracted points create. See
what we did using a laser pointer and the display_line module to connect the laser points.
May 28, 2007 -  Control » Robots » Parallax Boe-Bot
- The Boe-Bot is one of Parallax's best sellers. With many add-ons and applications available it also
proves to be a very versatile product and is used widely in academic, research and
hobbyist communities. RoboRealm has added a Boe-Bot module that provides control of the Parallax Boe-Bot from RoboRealm.
The module provides you with an easy way to send commands to the Boe-Bot based on variables created within RoboRealm.
Control » Robots » Parallax Boe-Bot
- The Boe-Bot is one of Parallax's best sellers. With many add-ons and applications available it also
proves to be a very versatile product and is used widely in academic, research and
hobbyist communities. RoboRealm has added a Boe-Bot module that provides control of the Parallax Boe-Bot from RoboRealm.
The module provides you with an easy way to send commands to the Boe-Bot based on variables created within RoboRealm.
May 15, 2007 -  Transforms » FFT
- The Fast Fourier Transform is a staple tool in signal processing. The new FFT module
adds the transform capabilities of the Fourier Transform to RoboRealm. The transform
is useful for removing unwanted periodic noise within images. Perhaps those with bad
camera reception may find the filtering capabilities of the FFT useful.
Transforms » FFT
- The Fast Fourier Transform is a staple tool in signal processing. The new FFT module
adds the transform capabilities of the Fourier Transform to RoboRealm. The transform
is useful for removing unwanted periodic noise within images. Perhaps those with bad
camera reception may find the filtering capabilities of the FFT useful.
May 04, 2007 -  Colors » Combine RGB
- What's a world without color? The Combine RGB module lets you recreate color images based on other
channels. Now you can process image color channels separately and recombine them into a new image. We've also added
XZY, YIQ, and HSV modules to our color conversion set. All color modules have also been upgraded
to convert back from their respective color spaces into RGB.
Colors » Combine RGB
- What's a world without color? The Combine RGB module lets you recreate color images based on other
channels. Now you can process image color channels separately and recombine them into a new image. We've also added
XZY, YIQ, and HSV modules to our color conversion set. All color modules have also been upgraded
to convert back from their respective color spaces into RGB.
May 04, 2007 -  Extensions » Photoshop Plugin Host
- RoboRealm can now work with some Photoshop Plugins. You can now use Photoshop plugins that don't require configurations to be saved
within RoboRealm. Note that not all Photoshop plugins will work as most are not typically meant for video processing and
thus may be quite slow.
Extensions » Photoshop Plugin Host
- RoboRealm can now work with some Photoshop Plugins. You can now use Photoshop plugins that don't require configurations to be saved
within RoboRealm. Note that not all Photoshop plugins will work as most are not typically meant for video processing and
thus may be quite slow.
Apr 16, 2007 -  Point Features » Moravec Interest Operator
- Similar to the Harris corner detector the Moravec Interest Operator identifies interesting points within the
image. Interest points are often used for object tracking and recognition. They also tend to identify
corners of objects as corners are great features to track since they are scale, translation, rotationally invariant.
Point Features » Moravec Interest Operator
- Similar to the Harris corner detector the Moravec Interest Operator identifies interesting points within the
image. Interest points are often used for object tracking and recognition. They also tend to identify
corners of objects as corners are great features to track since they are scale, translation, rotationally invariant.
Apr 16, 2007 -  Control » Other » Lynxmotion Sequencer Interface
- RoboRealm has partnered with Lynxmotion to provide an interface from RoboRealm to the Lynxmotion Sequencer program.
Now you can trigger complex servo sequences from RoboRealm based on what RoboRealm can see.
Control » Other » Lynxmotion Sequencer Interface
- RoboRealm has partnered with Lynxmotion to provide an interface from RoboRealm to the Lynxmotion Sequencer program.
Now you can trigger complex servo sequences from RoboRealm based on what RoboRealm can see.
Apr 03, 2007 -  Microsoft Robotics Studio
- RoboRealm has partnered with Microsoft to interface the smart camera capabilities of RoboRealm into the
Microsoft Robotics Studio 1.0 platform. The MSRS system can now interact with RoboRealm to request low level
image processing and computer vision tasks that are then acted upon within the MSRS system. Follow the
installation instructions to learn what the possibilities between the MSRS and RoboRealm have to offer.
Microsoft Robotics Studio
- RoboRealm has partnered with Microsoft to interface the smart camera capabilities of RoboRealm into the
Microsoft Robotics Studio 1.0 platform. The MSRS system can now interact with RoboRealm to request low level
image processing and computer vision tasks that are then acted upon within the MSRS system. Follow the
installation instructions to learn what the possibilities between the MSRS and RoboRealm have to offer.
Apr 03, 2007 -  Control » Servos » Lynxmotion SSC-32
- The Lynxmotion SSC-32 module allows you to interface RoboRealm to servos using a controller made by Lynxmotion
called the SSC-32 Servo Controller.
The servo controller supports up to 32 channels of 1uS resolution. In addition the board provides
synchronized movement so that all servos will update at the same time. The board also supports 4 digital or analog
inputs for adding additional sensors to your robotic projects.
Control » Servos » Lynxmotion SSC-32
- The Lynxmotion SSC-32 module allows you to interface RoboRealm to servos using a controller made by Lynxmotion
called the SSC-32 Servo Controller.
The servo controller supports up to 32 channels of 1uS resolution. In addition the board provides
synchronized movement so that all servos will update at the same time. The board also supports 4 digital or analog
inputs for adding additional sensors to your robotic projects.
Apr 02, 2007 -  Leaf LISP API
- RoboRealm is happy to announce a new API connection to LISP specifically towards The Leaf Project. The Leaf
Project is an open source implementation of an artificial life program based loosely on the game Creatures.
If you are a hobbyist robot engineer and you're looking to create
an interactive robot be sure to have a look at the Leaf Project.
Leaf LISP API
- RoboRealm is happy to announce a new API connection to LISP specifically towards The Leaf Project. The Leaf
Project is an open source implementation of an artificial life program based loosely on the game Creatures.
If you are a hobbyist robot engineer and you're looking to create
an interactive robot be sure to have a look at the Leaf Project.
Apr 02, 2007 -  Other » Floor Finder
- Knowing where the floor extends to beyond the immediate robot vicinity can be very helpful in
avoiding obstacles. In fact, Stanley, the winner of the past DARPA grand challenge, combined a vision
technique with lasers to win the race. The Floor Finder module implements part of this strategy (minus the
lasers) to provide you with some basic path planning capabilities.
Other » Floor Finder
- Knowing where the floor extends to beyond the immediate robot vicinity can be very helpful in
avoiding obstacles. In fact, Stanley, the winner of the past DARPA grand challenge, combined a vision
technique with lasers to win the race. The Floor Finder module implements part of this strategy (minus the
lasers) to provide you with some basic path planning capabilities.
Mar 16, 2007 -  Interface » Mouse Module
- We did something totally new today ... we were able to grab and drag a window around on the desktop
without touching the mouse or keyboard. We did this by just moving around a red ball. This is not going to
make the mouse extinct but it is a fun new interface that makes a lot of sense in some situations.
Interface » Mouse Module
- We did something totally new today ... we were able to grab and drag a window around on the desktop
without touching the mouse or keyboard. We did this by just moving around a red ball. This is not going to
make the mouse extinct but it is a fun new interface that makes a lot of sense in some situations.
Mar 12, 2007 -  Transform » Affine
- Not all images are perfectly aligned with the camera view. The Affine Transform provides
a way to align an object into a more uniform view in preparation for measurement or other
attribute analysis.
Transform » Affine
- Not all images are perfectly aligned with the camera view. The Affine Transform provides
a way to align an object into a more uniform view in preparation for measurement or other
attribute analysis.
Mar 12, 2007 -  Transform » Radial
- If you take pictures with webcams that use smaller lenses you will notice a rounding of straight lines. These
are known as barrel or pincushion distortions. Using the Radial transform you can correct for those distortions
to improve the image content.
Transform » Radial
- If you take pictures with webcams that use smaller lenses you will notice a rounding of straight lines. These
are known as barrel or pincushion distortions. Using the Radial transform you can correct for those distortions
to improve the image content.
Mar 02, 2007 -  Control » Robots » Surveyor SRV-1
- RoboRealm now supports the Surveyor SRV-1 robot with the addition of the Surveyor_SRV1 module.
The folks at Surveyor have designed a really nice robot for use in machine vision and we're excited to
join RoboRealm and the SRV-1. To show you a quick example of what is possible have a look at our
wall avoiding tutorial that shows off the new module by helping the SRV-1 avoid walls.
Control » Robots » Surveyor SRV-1
- RoboRealm now supports the Surveyor SRV-1 robot with the addition of the Surveyor_SRV1 module.
The folks at Surveyor have designed a really nice robot for use in machine vision and we're excited to
join RoboRealm and the SRV-1. To show you a quick example of what is possible have a look at our
wall avoiding tutorial that shows off the new module by helping the SRV-1 avoid walls.
Feb 19, 2007 -  Control » Robots » IRobot Create
- Many of you have probably already discovered IRobot's new Create Robot that was announced in Vegas at CES.
We were very excited about seeing its potential given its very inexpensive price range. We've happy
to announce that we REALLY like the Create! It is just a great robot base. For those of you
who don't like to get into the mechanics of building a robot base from scratch it is a really nice
platform. We're happy to announce that RoboRealm now speaks Create's Open Interface language! If you're
interested in incorporating vision into the Create then you will need to check out what RoboRealm plus
the Create have to offer.
Control » Robots » IRobot Create
- Many of you have probably already discovered IRobot's new Create Robot that was announced in Vegas at CES.
We were very excited about seeing its potential given its very inexpensive price range. We've happy
to announce that we REALLY like the Create! It is just a great robot base. For those of you
who don't like to get into the mechanics of building a robot base from scratch it is a really nice
platform. We're happy to announce that RoboRealm now speaks Create's Open Interface language! If you're
interested in incorporating vision into the Create then you will need to check out what RoboRealm plus
the Create have to offer.
Feb 17, 2007 -  Control » Cameras » Creative Live! Motion
- Joining the Logitech Orbit camera RoboRealm now supports the Creative Live! Motion webcam that also
has pan and tilt built into the camera. These cameras are a great way to experiment with pan
tilt systems incorporated with vision.
Control » Cameras » Creative Live! Motion
- Joining the Logitech Orbit camera RoboRealm now supports the Creative Live! Motion webcam that also
has pan and tilt built into the camera. These cameras are a great way to experiment with pan
tilt systems incorporated with vision.
Feb 16, 2007 -  Threshold » Population Threshold
- Natural images often produce many small pixel groupings that need to be clustered together to
produce larger blobs that can be further processed by other modules. The Population Threshold
module provides a quick way to cluster those unconnected pixel groupings while ignoring
other sparse clusters.
Threshold » Population Threshold
- Natural images often produce many small pixel groupings that need to be clustered together to
produce larger blobs that can be further processed by other modules. The Population Threshold
module provides a quick way to cluster those unconnected pixel groupings while ignoring
other sparse clusters.
Feb 05, 2007 -  Matching » Shape Matching
- We've really improved the shape matching capabilities of RoboRealm by adding in multiple shape detection and
filters to remove bad or unwanted objects. The Shape Match module provides you a way to
examine objects based solely on their shape (or silhouette). You can also read a great
forum discussion that lead to its improvement at Object Analysis.
Matching » Shape Matching
- We've really improved the shape matching capabilities of RoboRealm by adding in multiple shape detection and
filters to remove bad or unwanted objects. The Shape Match module provides you a way to
examine objects based solely on their shape (or silhouette). You can also read a great
forum discussion that lead to its improvement at Object Analysis.
Jan 28, 2007 -  Matching » Circles
- Detecting circles is a very basic need for many vision projects. We've introduced
a new contour based circle detector that should help you detect those
illusive balls, coins, traffic lights, finger tips, etc.
Matching » Circles
- Detecting circles is a very basic need for many vision projects. We've introduced
a new contour based circle detector that should help you detect those
illusive balls, coins, traffic lights, finger tips, etc.
Jan 22, 2007 -  Transforms » Mosaic
- For many of you one camera was not enought! RoboRealm now supports up to 16 simultaneous cameras! This should be
enough for everyones camera needs. Using multiple cameras is easy. Just plug in all available
USB cameras and use the modules to process them as needed. You will notice the cameras
being listed in many of the dropdown menus within modules that make sense. For example, the Mosaic
module can be used to create a mosaic of all the camera images. Other modules include the
Marker module (easiest way to switch the current processing to another camera view), the
Math module, the Replace Blob modules, and more.
Transforms » Mosaic
- For many of you one camera was not enought! RoboRealm now supports up to 16 simultaneous cameras! This should be
enough for everyones camera needs. Using multiple cameras is easy. Just plug in all available
USB cameras and use the modules to process them as needed. You will notice the cameras
being listed in many of the dropdown menus within modules that make sense. For example, the Mosaic
module can be used to create a mosaic of all the camera images. Other modules include the
Marker module (easiest way to switch the current processing to another camera view), the
Math module, the Replace Blob modules, and more.
Jan 15, 2007 -  Control » Cameras » Logitech Orbit
- Need an easy to use pan/tilt device? Have you looked at the Logitech Orbit camera? We've had one for a while
and are very pleased with the image quality. We've now introduced an Orbit module that allows you to control the
pan/tilt actions of that camera. This is a great solution for a pan/tilt camera
that can be attached to any PC based solution using USB.
Control » Cameras » Logitech Orbit
- Need an easy to use pan/tilt device? Have you looked at the Logitech Orbit camera? We've had one for a while
and are very pleased with the image quality. We've now introduced an Orbit module that allows you to control the
pan/tilt actions of that camera. This is a great solution for a pan/tilt camera
that can be attached to any PC based solution using USB.
Jan 15, 2007 -  Edges » Connect Points
- Often after using an edge detector or thresholding an image you are left with many points along a potential edge that
are slightly disconnected. Subsequent processing would work better if these points were connected. The Connect Points
does just that. Points that are close to each other are connected together and help "connect the points".
Edges » Connect Points
- Often after using an edge detector or thresholding an image you are left with many points along a potential edge that
are slightly disconnected. Subsequent processing would work better if these points were connected. The Connect Points
does just that. Points that are close to each other are connected together and help "connect the points".
Jan 15, 2007 - Interface » Keyboard - We introduced the Joystick control
a while back and it became quickly apparent that many of you don't have Joysticks! We've
handled that issue by providing a keyboard interface to perform a similar function. Now you can
control your USB missile launcher using your keyboard.
Dec 28, 2006 -  USB Missile Launcher Tutorial
- Our latest tutorial introduces two new modules. The Joystick module allows you to control your
robotic projects using an ordinary joystick. The USB Missile Launcher module provides control over the
Dream Cheeky USB Missile Launcher. The tutorial shows how we used those two modules to setup joystick control
of the Launcher.
USB Missile Launcher Tutorial
- Our latest tutorial introduces two new modules. The Joystick module allows you to control your
robotic projects using an ordinary joystick. The USB Missile Launcher module provides control over the
Dream Cheeky USB Missile Launcher. The tutorial shows how we used those two modules to setup joystick control
of the Launcher.
Dec 27, 2006 - Phidgets Servo Control - The Phidgets servo controller has been added to the ever expanding servo/motor controller modules.
Using USB connections the Phidget servo controller allows control to a maximum of 4 servos. Given the ease of use the
Phidget servo controller is great for controlling your robotic projects.
Dec 20, 2006 -  Display Date/Time - Sometimes it is
nice to add a time/date stamp to your images as they get saved - the Display DateTime does just that.
Display Date/Time - Sometimes it is
nice to add a time/date stamp to your images as they get saved - the Display DateTime does just that.
Dec 18, 2006 -  Blob Replace - Once blobs have been detected
it is sometimes desirable to replace them with well defined shapes such as circles, squares, etc. The
replace blob module will replace the blobs present with a shape containing the same area as the
blob.
Blob Replace - Once blobs have been detected
it is sometimes desirable to replace them with well defined shapes such as circles, squares, etc. The
replace blob module will replace the blobs present with a shape containing the same area as the
blob.
Dec 18, 2006 - RoboRealm WebServer - A new WebServer capability has been added
to RoboRealm to allow you to stream the processed images from RoboRealm to web browsers or
other Internet streaming devices.
Dec 11, 2006 - 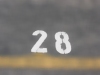 Bilateral Filter - A new mean filter that
doesn't blur object edges has been added. The bilateral filter preserves edges while blurring the
internal parts of an object. Successive instances of this filter can turn an image into
a cartoonist type of image.
Bilateral Filter - A new mean filter that
doesn't blur object edges has been added. The bilateral filter preserves edges while blurring the
internal parts of an object. Successive instances of this filter can turn an image into
a cartoonist type of image.
Nov 20, 2006 - Additional API Examples - The new API continues to be quite popular.
To continue our support for multiple languages we've added in example wrappers for Java and CSharp. Download all API examples or check
our documentation to see if the API is appropriate for you.
Nov 05, 2006 -  Lego NXT -
We've introduced the Lego NXT module that will allow you to control the Lego NXT Mindstorms robot
using vision. We've also added a new tutorial of a modified TriBot picking up a blue ball and
then placing it towards an orange cone. Check out the tutorial at Lego NXT Ball Picker
or see the
documentation to see how you can use the new module
to enhance your Lego Robot!
Lego NXT -
We've introduced the Lego NXT module that will allow you to control the Lego NXT Mindstorms robot
using vision. We've also added a new tutorial of a modified TriBot picking up a blue ball and
then placing it towards an orange cone. Check out the tutorial at Lego NXT Ball Picker
or see the
documentation to see how you can use the new module
to enhance your Lego Robot!
Oct 30, 2006 -  Canny Edge Detection -
The Canny edge detection algorithm is considered one of the best edge detection techniques currently available.
The Canny module enhances the current RoboRealm capabilities of edge detection by implementing
the Canny Edge Detection technique.
See the
documentation for an example of why the Canny edge detection
technique is one of the best edge detection techniques available.
Canny Edge Detection -
The Canny edge detection algorithm is considered one of the best edge detection techniques currently available.
The Canny module enhances the current RoboRealm capabilities of edge detection by implementing
the Canny Edge Detection technique.
See the
documentation for an example of why the Canny edge detection
technique is one of the best edge detection techniques available.
Oct 27, 2006 -  Flicker removal -
Basic PC based webcams can have a lot of noise pixels especially in low light situations.
The flicker removal module helps to reduce the flickering effects of low light situations.
The flicker
module will stabilize image pixels by ensuring that only the most frequent pixel value
is presented in the final image.
See the
documentation for an example of how the flicker removal
module can stabilize your low light images.
Flicker removal -
Basic PC based webcams can have a lot of noise pixels especially in low light situations.
The flicker removal module helps to reduce the flickering effects of low light situations.
The flicker
module will stabilize image pixels by ensuring that only the most frequent pixel value
is presented in the final image.
See the
documentation for an example of how the flicker removal
module can stabilize your low light images.
Oct 24, 2006 -  Thresholding with Hysteresis - We've introduced a new
intensity thresholding which is simpler than the color thresholding module but also offers
the capability to use hysteresis when thresholding. Hysteresis is most commonly known as part of the
Canny edge detection but is also useful when thresholding any image. See the
documentation for an example of why hysteresis
is such a powerful concept in image processing tools.
Thresholding with Hysteresis - We've introduced a new
intensity thresholding which is simpler than the color thresholding module but also offers
the capability to use hysteresis when thresholding. Hysteresis is most commonly known as part of the
Canny edge detection but is also useful when thresholding any image. See the
documentation for an example of why hysteresis
is such a powerful concept in image processing tools.
Oct 23, 2006 - Additional API Examples - The new API has been quite popular.
To help out others in different languages than C/C++ we've added in example wrappers for COM (Visual Basic, WScript) and
Python. More to come in Java, VB.NET and CSharp. Download all API examples or check
our documentation to see if the API is appropriate for you.
Oct 13, 2006 - RoboRealm Server API -
Now you can treat RoboRealm as an image processing server and command it from your own custom robot
applications! We've added in an XML based API that allows you to load, save, grab, put images and variables to and from RoboRealm.
Along with the RoboRealm Plugins and VBScript programming we've reached a new level of
customization that is possible between your programs and the vision processing capabilities of
RoboRealm. Whether you just need to simply grab an image (yes, the JMF java folks now have another route) or perform
blob extraction you'll find RoboRealm to be a very useful tool.
Oct 12, 2006 - 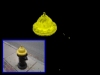 Display Image -
To aid in seeing more than one image view at a time we've added the Display Image module
that can perform picture in picture display. It is a nice one for recording video sequences!
Display Image -
To aid in seeing more than one image view at a time we've added the Display Image module
that can perform picture in picture display. It is a nice one for recording video sequences!
Sep 17, 2006 - ![]() Media Reader -
A new and improved file and Internet streaming reader module has been added. Instead of just
AVI files you can now playback mpg, wmv and asf files for use in RoboRealm processing. You can
also use the module to receive Internet streams. See documentation for an example URL that
streams video from an office overlooking an airport.
Media Reader -
A new and improved file and Internet streaming reader module has been added. Instead of just
AVI files you can now playback mpg, wmv and asf files for use in RoboRealm processing. You can
also use the module to receive Internet streams. See documentation for an example URL that
streams video from an office overlooking an airport.
Sep 11, 2006 - Serial Communications - Use the serial communication module to send signals to robotic devices whose protocols are
not directly supported by RoboRealm. For instance you can use it to communicate to the VEX
Robotics System or to your own program running on a Basic Stamp processor!
Sep 05, 2006 - 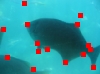 Harris Corners - Detect corners using the Harris corner detector.
Harris Corners - Detect corners using the Harris corner detector.
Aug 29, 2006 - Vocal Communication - RoboRealm now supports the Microsoft Speech API 5.0 and allows you to command RoboRealm to
speak or listen to vocal commands.
Aug 28, 2006 -  Lego Mindstorm - RoboRealm
now supports the Lego Mindstorm interface. Using an inexpensive usb webcam and the PC you
already have you can now add vision to your RCX brick projects!
Lego Mindstorm - RoboRealm
now supports the Lego Mindstorm interface. Using an inexpensive usb webcam and the PC you
already have you can now add vision to your RCX brick projects!
Aug 27, 2006 - Distributed Robotic Vision - RoboRealm can now feed images to other
machines running RoboRealm to enable distributed parallel processing
Aug 14, 2006 - RoboRealm now uses DirectX 9.0! We saw a 2x speedup in frame processing from VFW but we
will still default back to VFW for those that do not have DirectX installed. If you're running
RoboRealm and have directX download the latest version to see a speed increase!
Aug 11, 2006 - 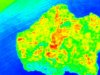 Pseudo Coloring - artificial coloring can reveal aspects about images that you may not have noticed
Pseudo Coloring - artificial coloring can reveal aspects about images that you may not have noticed
Aug 03, 2006 - New tutorial on tracking green objects
Jul 17, 2006 - Geometric, Color, Moments - more image processing statistics
Jul 11, 2006 - Java Plugin - now you can process webcam images in Java!
Jul 10, 2006 -  Hough Transform - lines, Lines, LINES
Hough Transform - lines, Lines, LINES
Jul 3, 2006 - Midpoint Filter