











HIGHLIGHTS
RoboRealm simplifies vision programming and allows you to easily prototype with many advanced modules to achieve the desired result.
 Easy to Use GUI Interface - No Code / Low Code
Easy to Use GUI Interface - No Code / Low Code
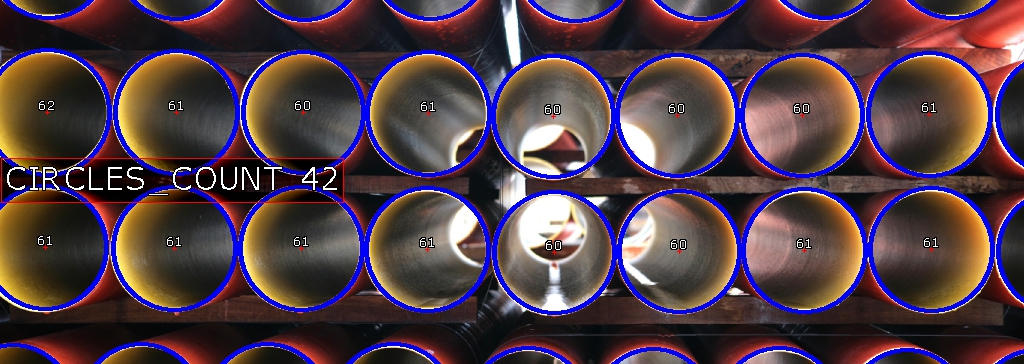
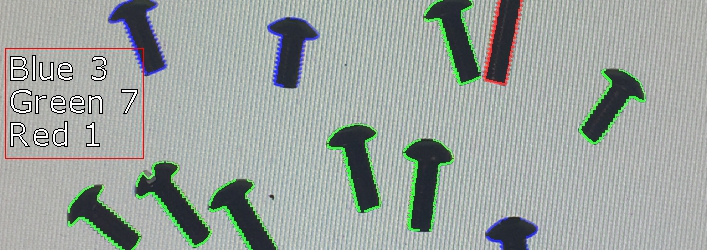
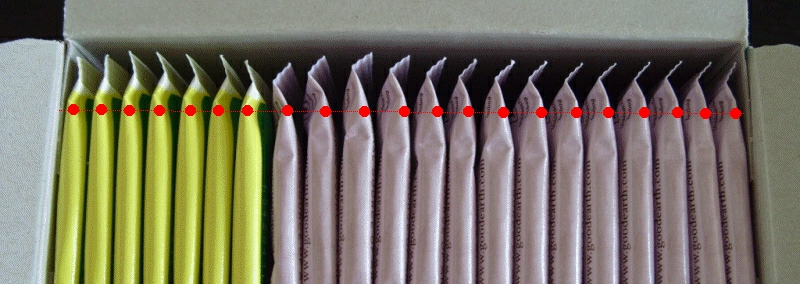
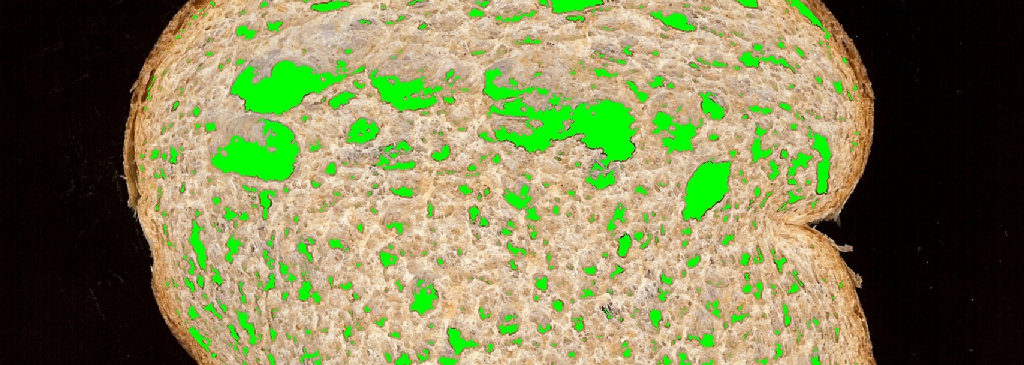
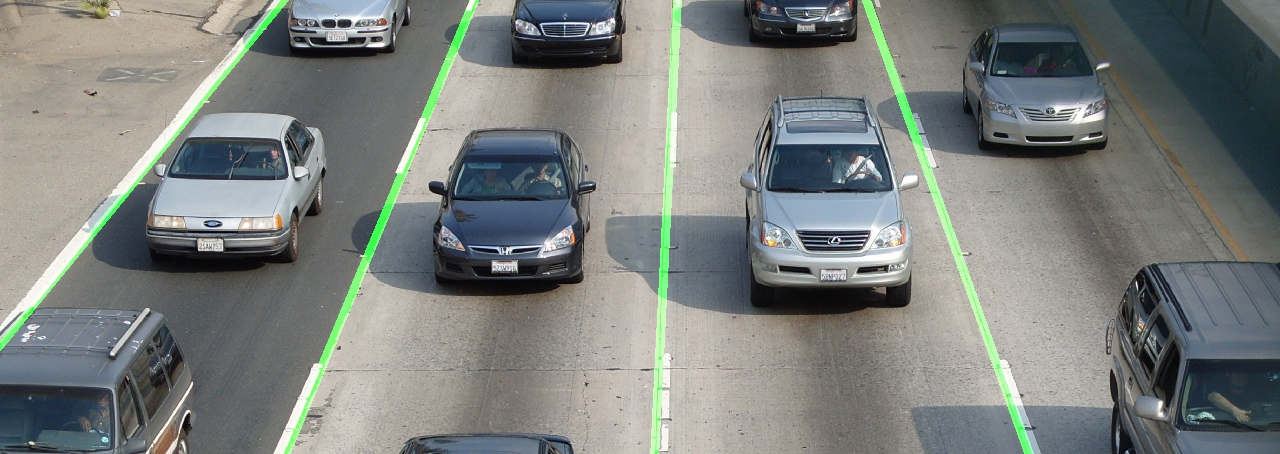
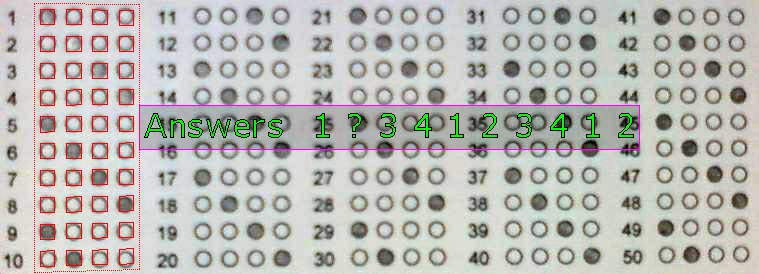
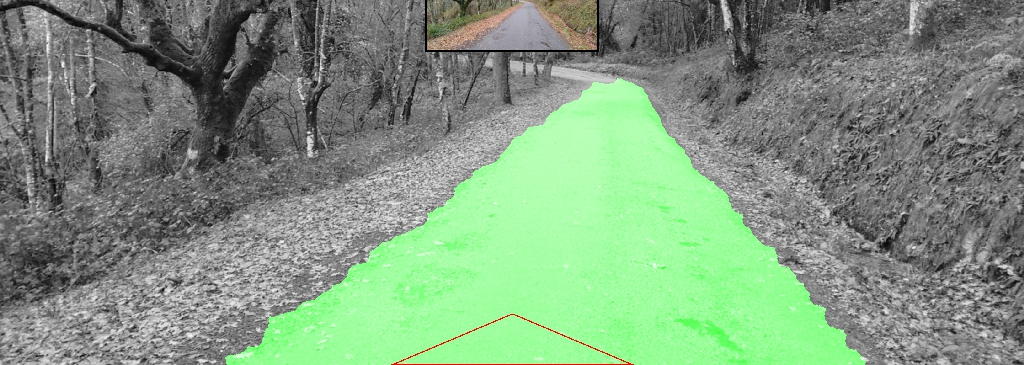
Hundreds of Image Processing Modules
Camera Agnostic
Realtime Parameter Changes
Fully Supported Server API
Multiple Image Sources
Multiple Output Interfaces (File, Web, FTP, Email, etc)
Plugin Framework for Custom Modules
Active Online Community with help from the experts
Denver, Colorado, USA based company





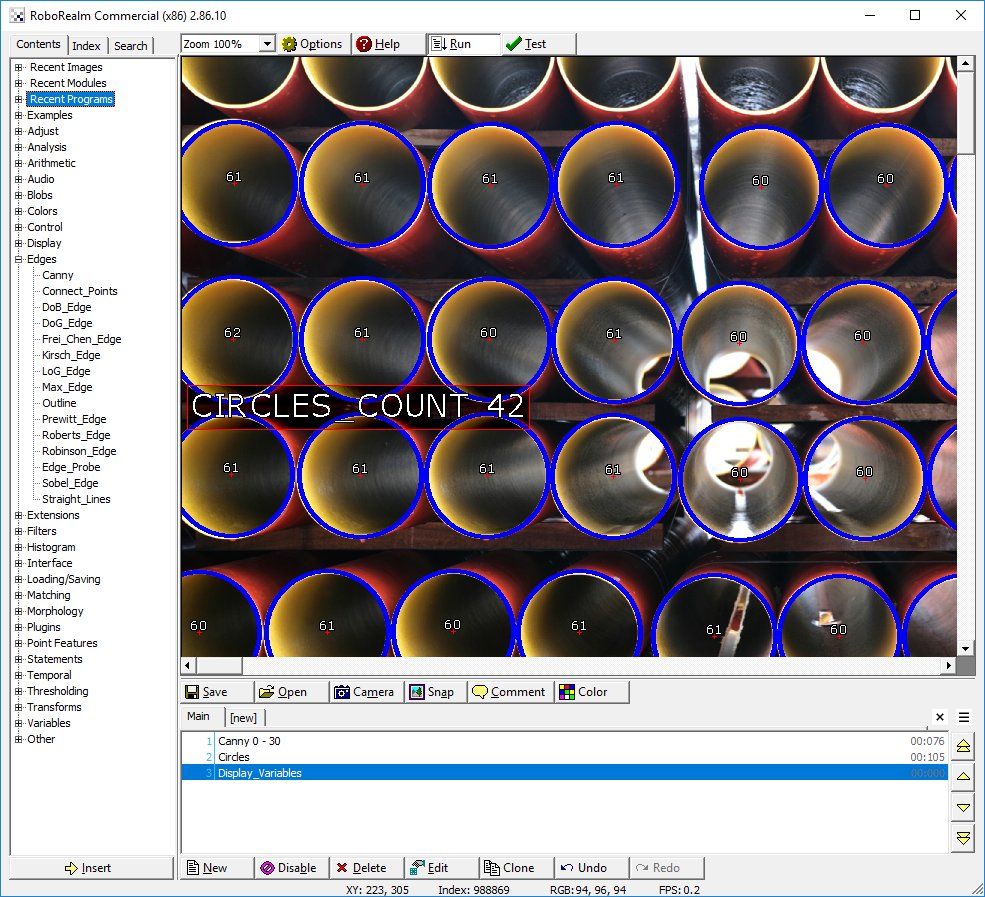
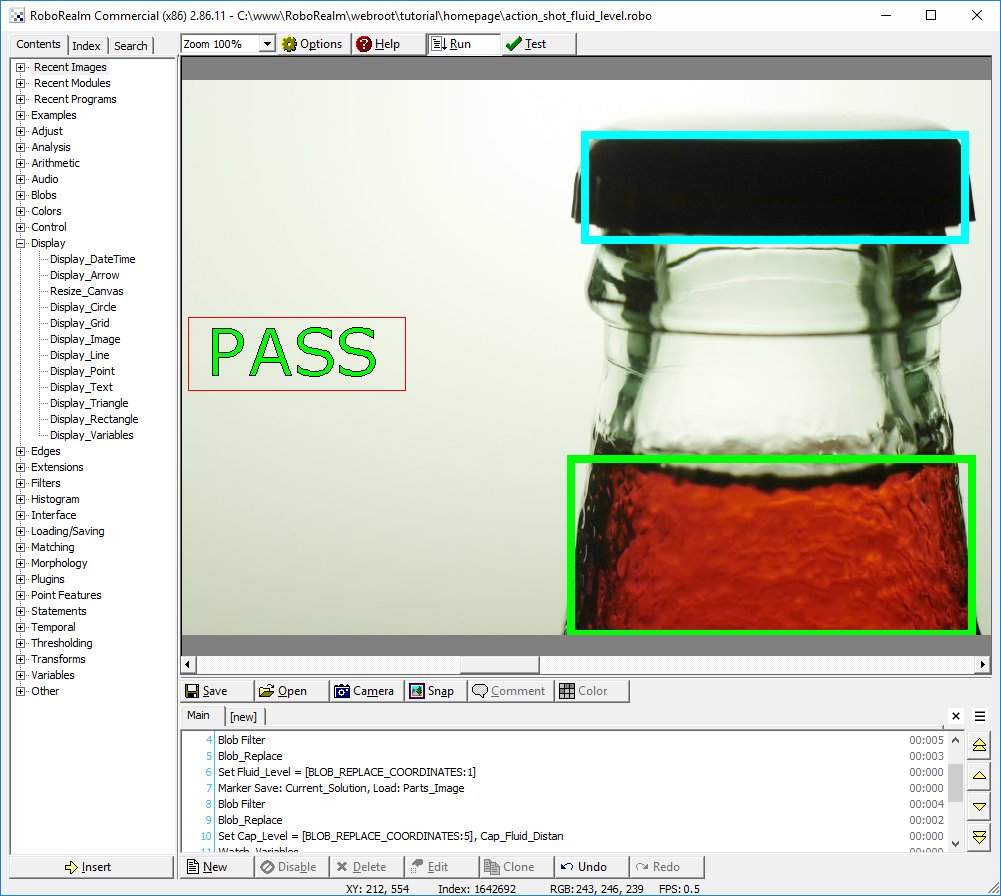
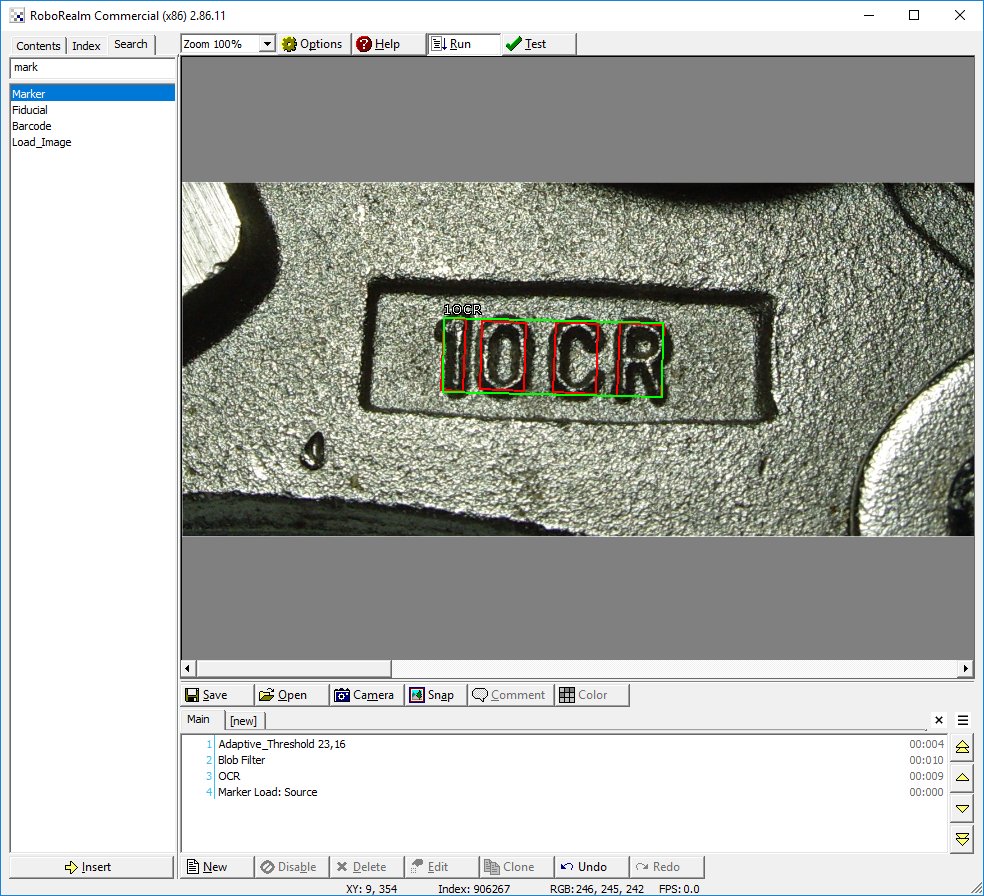
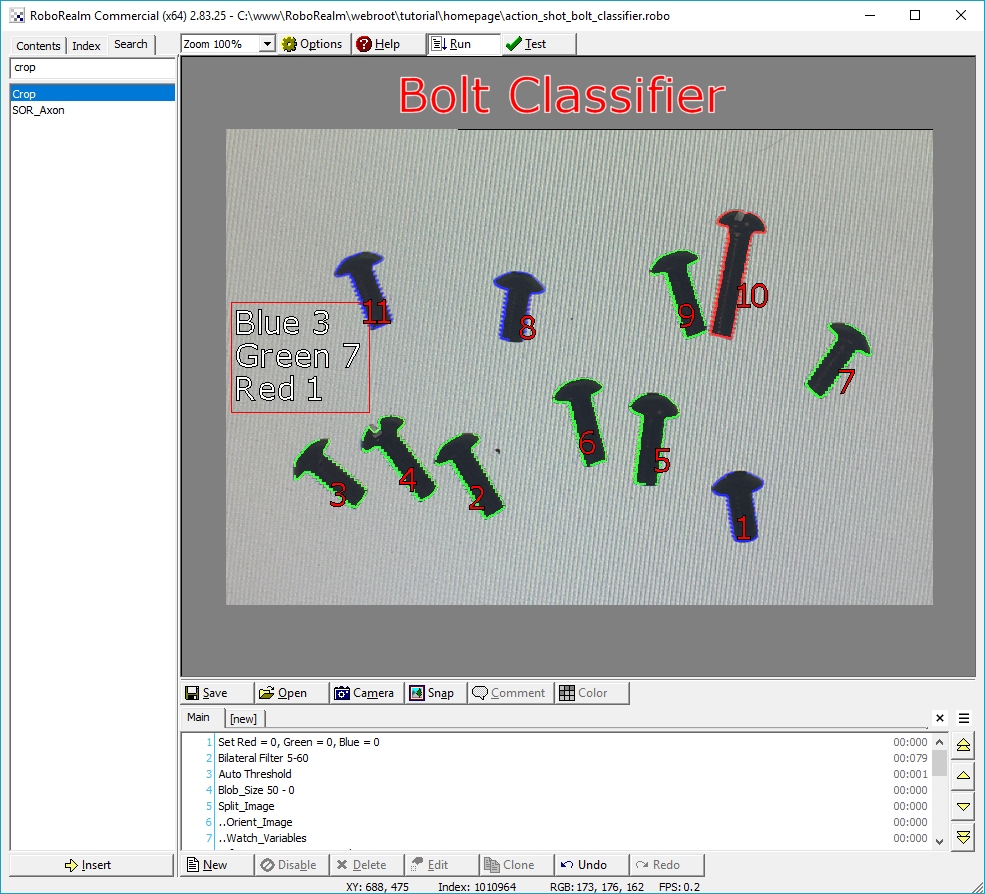
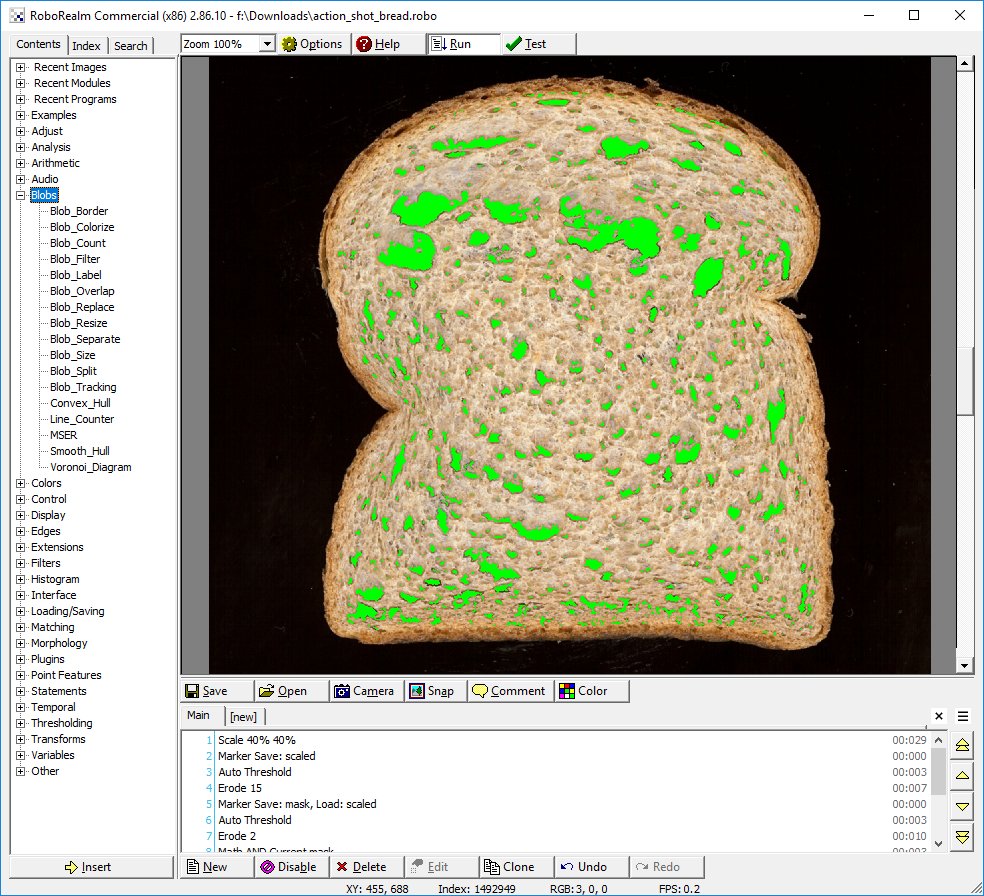
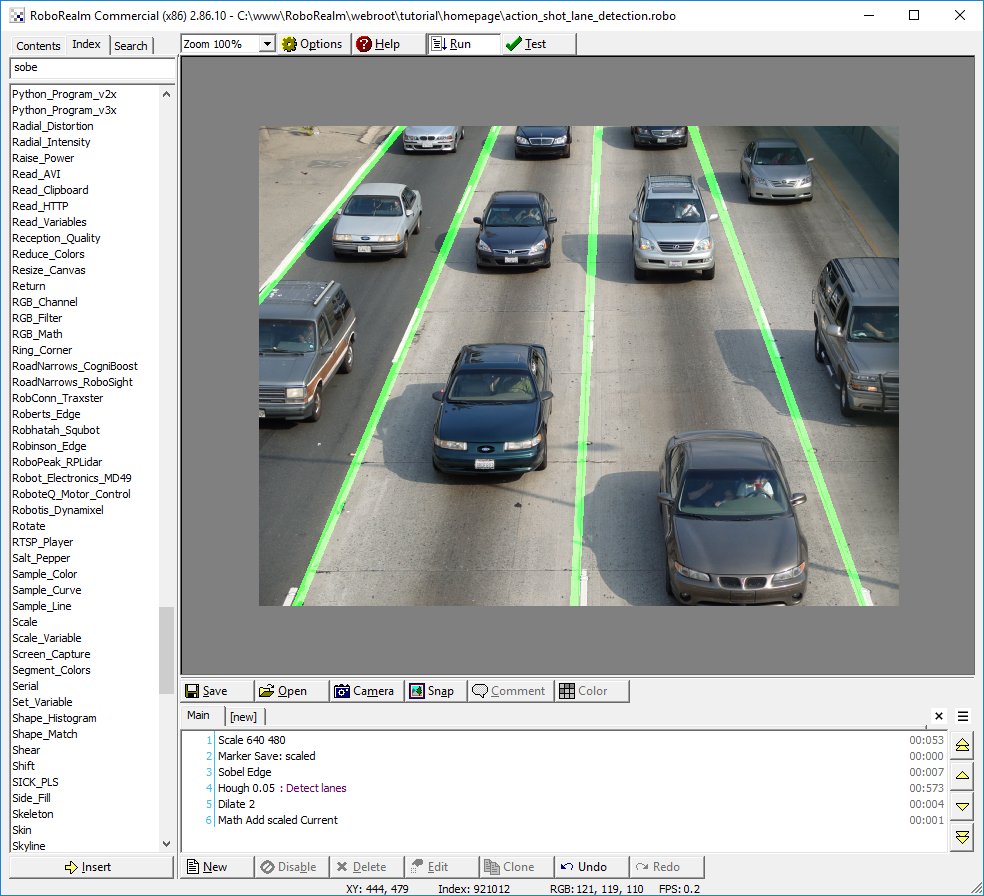
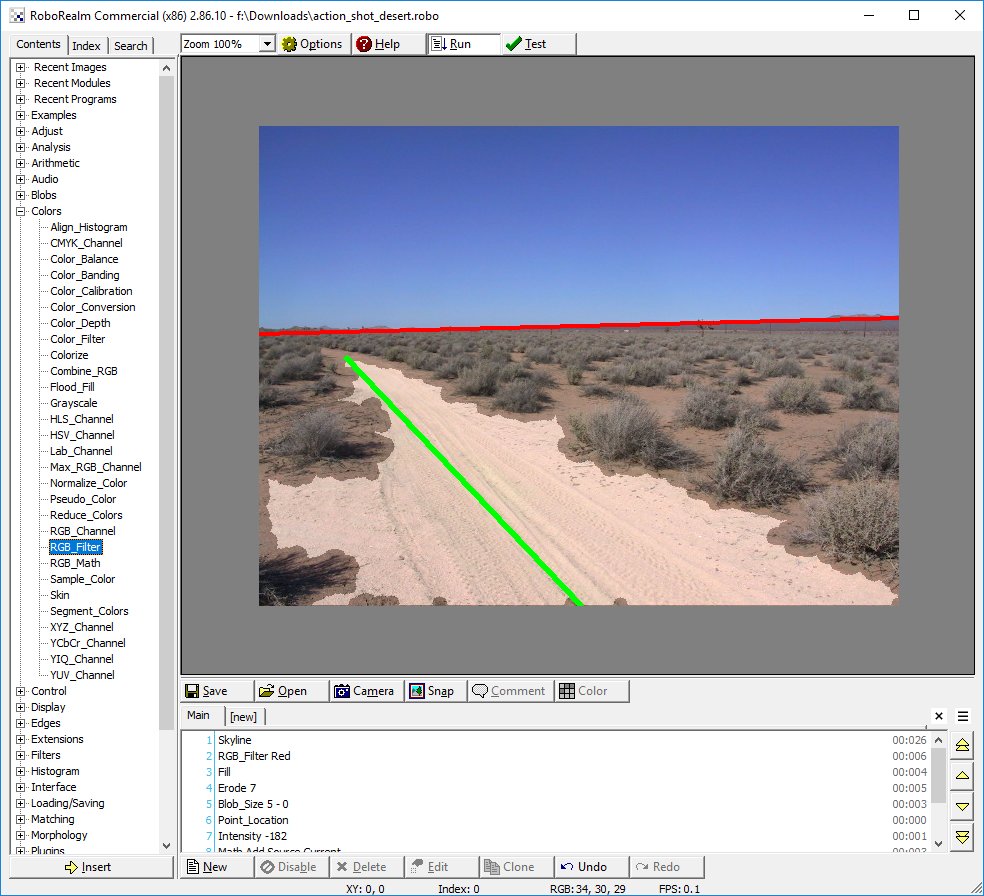
SCREENSHOTS
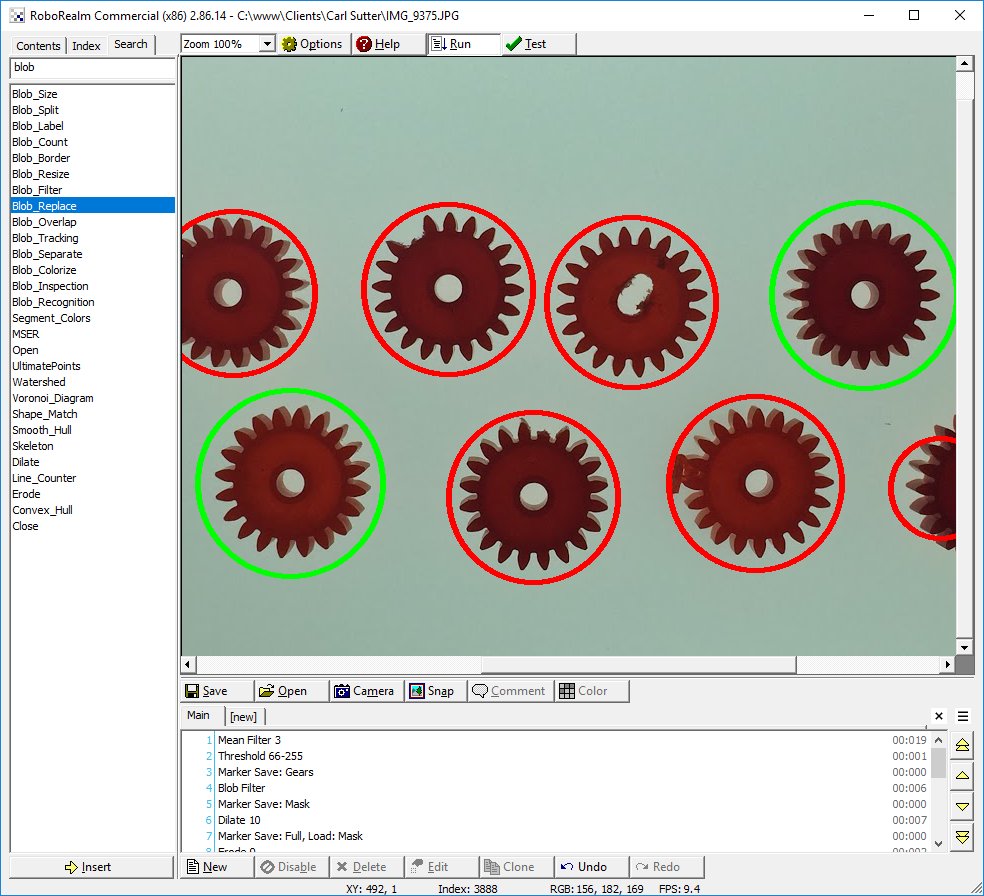
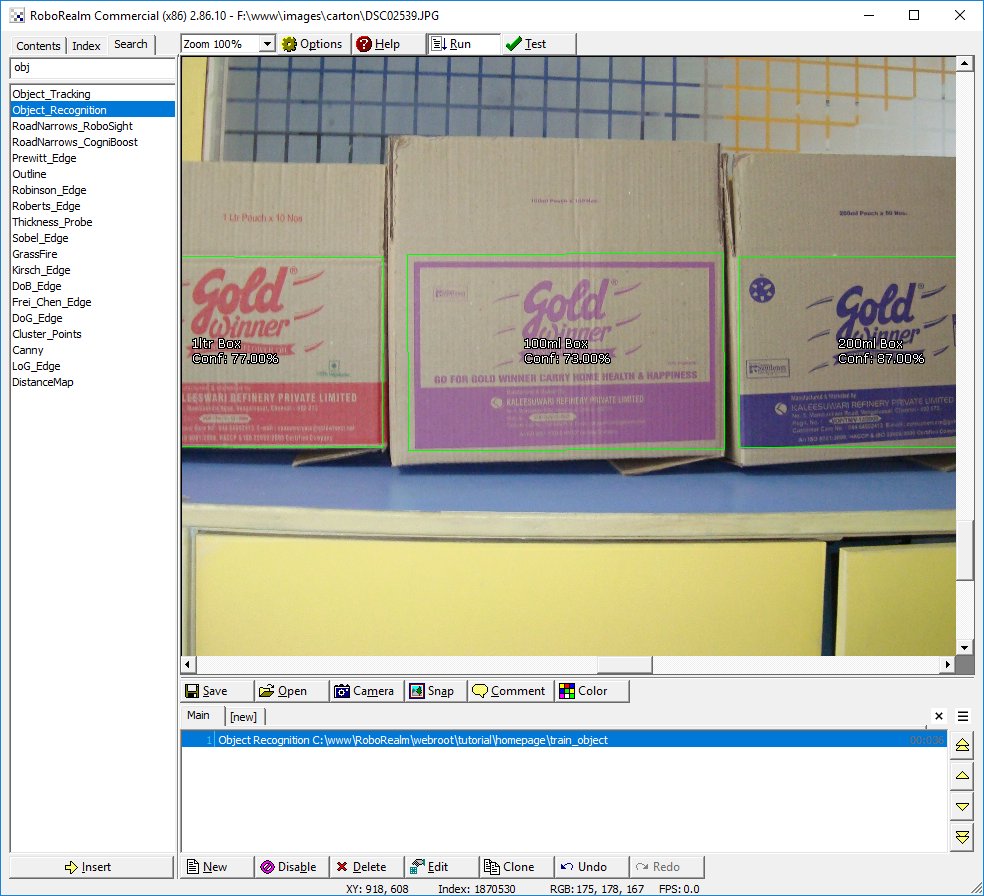
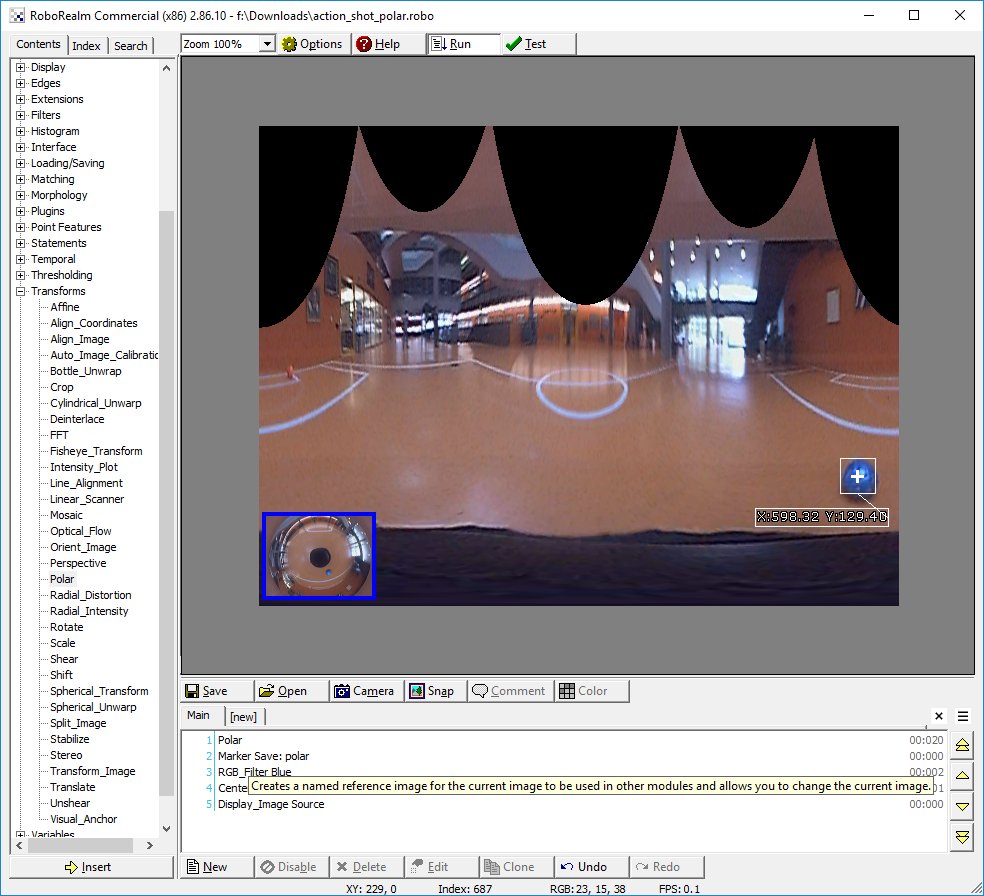
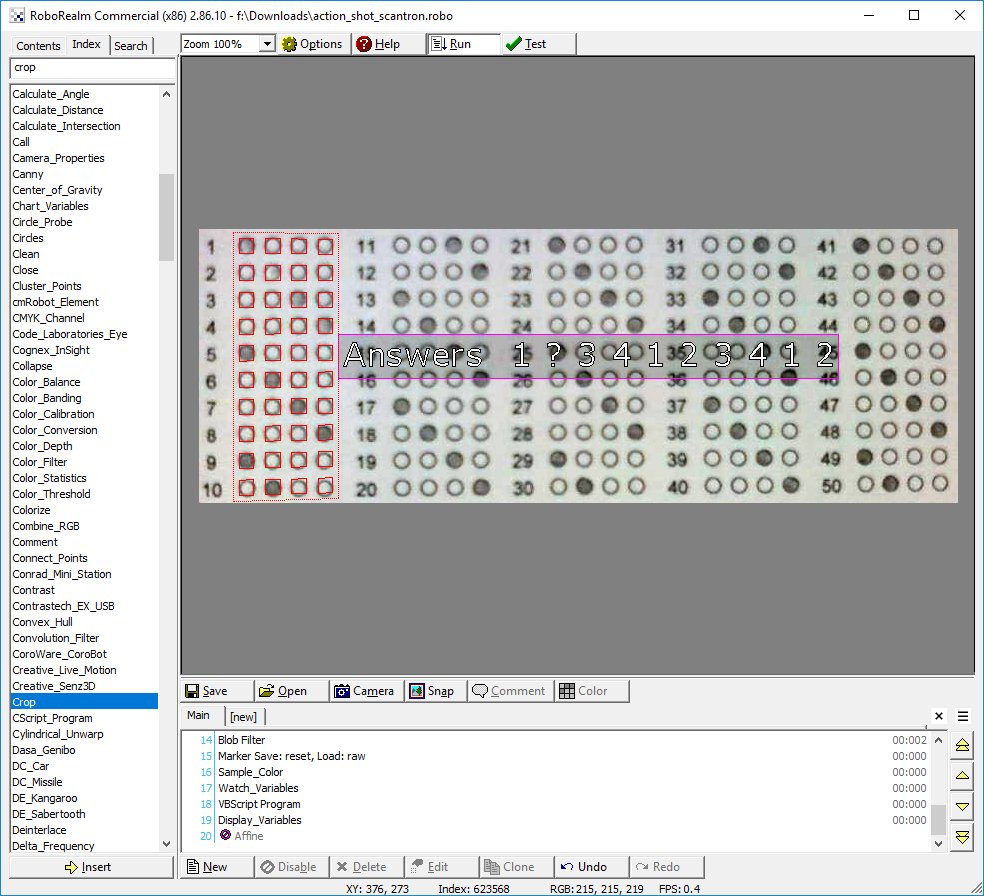
POINT AND CLICK
Custom GUI for each module
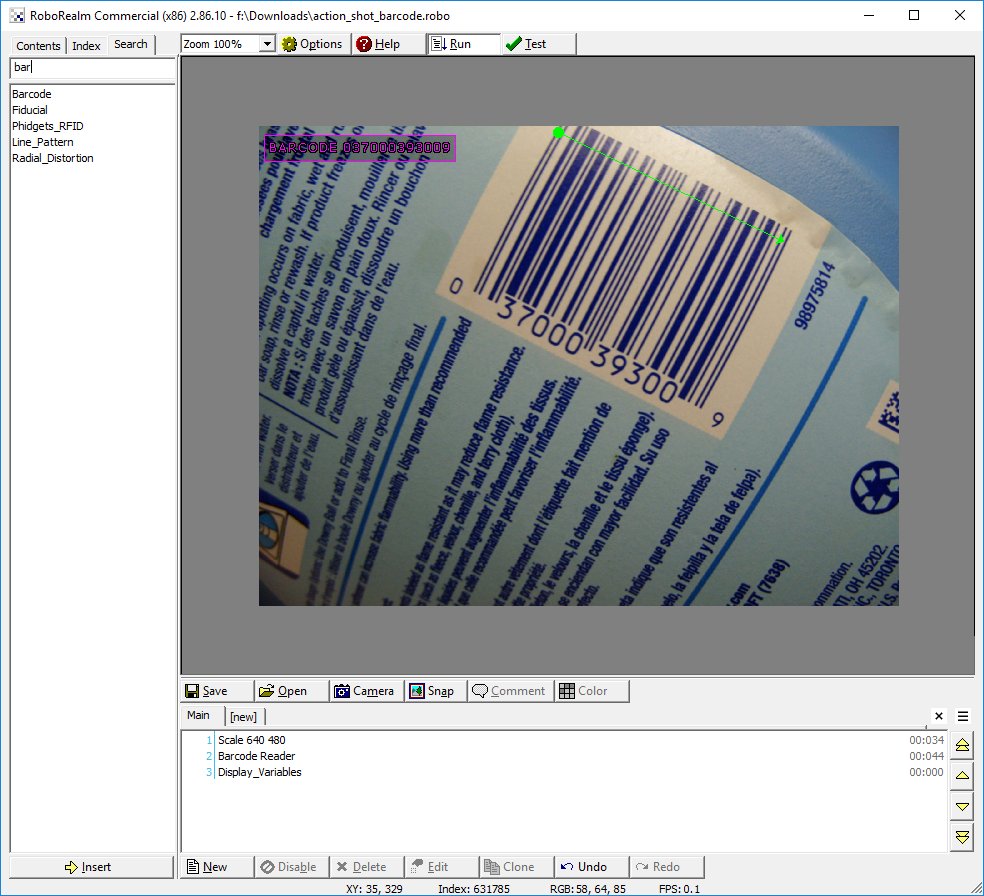
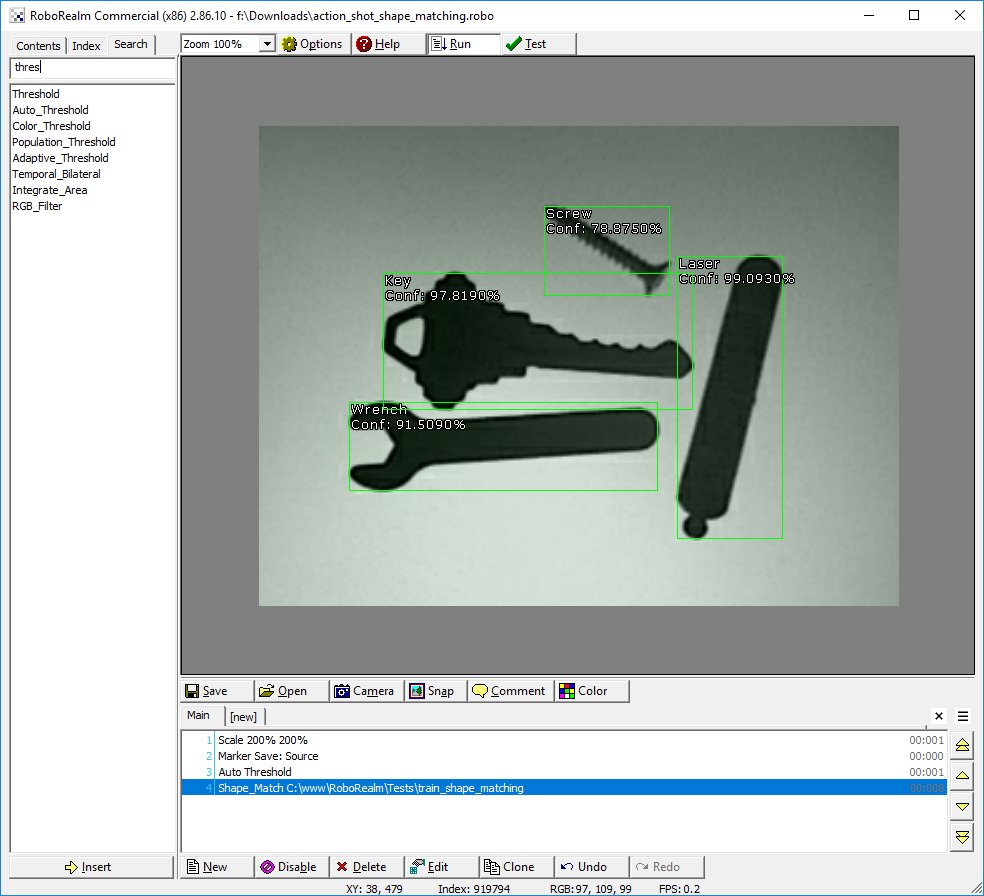
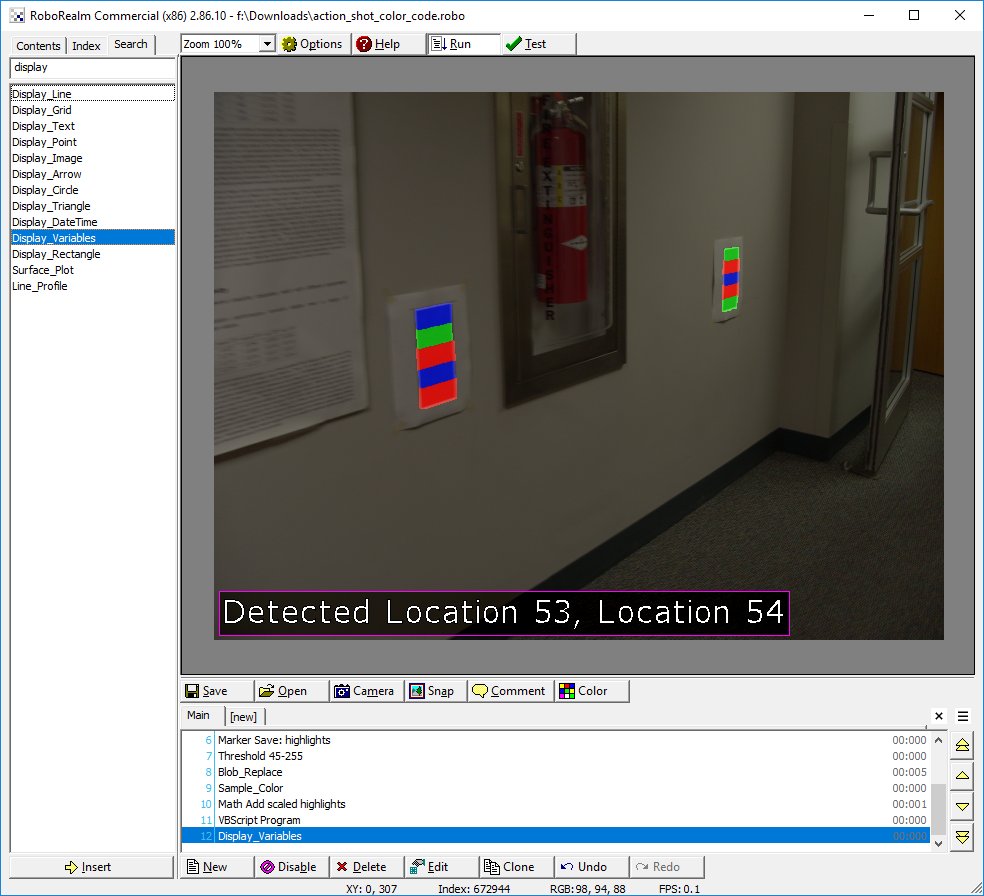
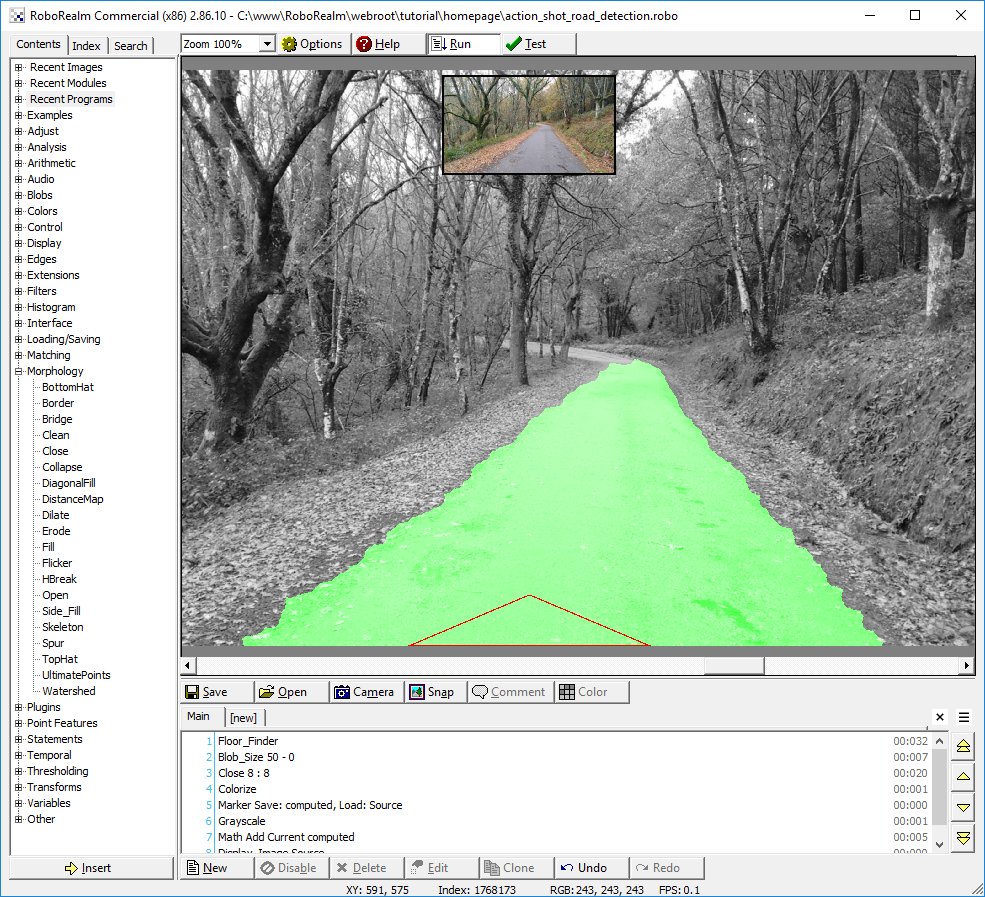
REALTIME PARAMETER UPDATES
Parameter changes affect the image instantly
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
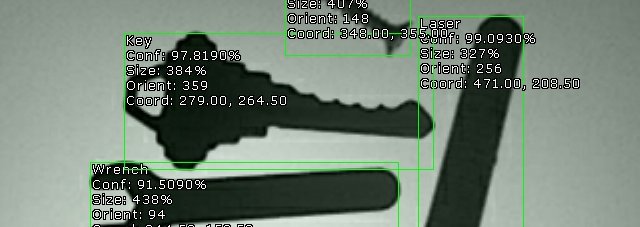
Mar 26, 2023 - Introduction of a new Train button that allows genetic auto-tuning capabilities for various modules. Simply specify the object to be detected and the module auto-tunes the parameters as best it can to achieve the desired results. As this feature becomes included in more and more modules, you will be able to create AI assisted vision solutions that are fully explainable without the AI Deep Learning / Neural Network black box issues. |
 |
Feb 20, 2023 - The Fast Fourier Transform module was updated to include mask creation and inverting of the transform to provide a quick way to eliminate high or low frequencies from images. |
PROVIDING PERSONALIZED AND HIGH QUALITY SERVICES.
Our development partners are available to help with projects that require more "under the hood" development such as control panel interfaces, robot integration or automation design.
GET PRICING