
Why track colors?
Tracking objects based on color is one of the quickest and easiest methods for tracking an object from one image frame to the next. The speed of this technique makes it very attractive for near-realtime applications but due to its simplicity many issues exist that can cause the tracking to fail. This tutorial is about how you can use a colored object's size to distance the robot (i.e. our BucketBot robot) from that object. Note that RoboRealm is running ON the robot as it is equipped with Windows 2000 and a NTSC camera with a USB digitizer.
First, let's start by looking at an image which contains an object to be tracked.

The sample image taken from BucketBot's camera contains a green ball. We'd like to move the robot away from the ball (i.e. backwards) when the ball approaches and move towards the ball (forward) when it moves away.
Detecting the green ball
We use the RGBFilter of RoboRealm to remove all objects in the image except the green ball. The RGBFilter is set to filter out green objects using an RGB channel subtraction and then normalizes the remaining values. This will highlight green objects nicely.
Now that the ball is segmented from the background we need to determine the objects relative size from image to image to determine if we need to move forward, backwards or remain stationary.
Ball Size
We don't really need the exact size of the ball since our movements will be based on any arbitrary measurement that is consistent from one frame to another. When that measurement decreases we should move forward, when it increases we should move backwards.By adding in the Center of Gravity module we now have some RoboRealm variables that we can use for this task. We will chose COG_BOX_SIZE and configure the module to show a bounding box around 80% of the pixels. The COG_BOX_SIZE is the width OR height of the bounding box as the bounding box in this case is always ensured to be square.
Below we can see the Center of Gravity graphical overlay for two images. One closer than the other.
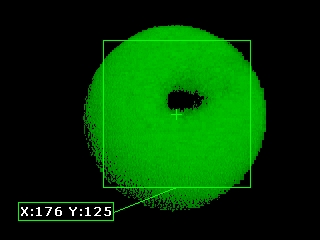
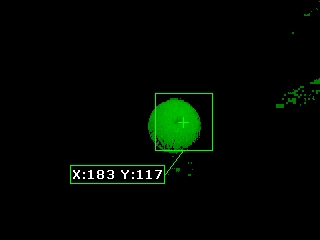
The COG_BOX_SIZE for image #1 is 148 while for image #2 it is 61. It is clear that we can use this number as a movement indicator to the BucketBot.
This works well but we have a problem when images get much further away.
Green Noise
When the ball is far away from the robot the ball's image is very small and only turns on a couple pixels. With so few pixels the RGBFilter becomes more sensitive to background noise. This problem is further exacerbated when the image size is reduced to a small 160x120. Because of this additional noise the COG module starts to have issues centering on the actual ball and may chose not to target the ball at all. This problem can be seen in the following images:

You can see that the processed image using the green RGBFilter introduces a lot of noise. Looking closely at the original image we notice some spurious green pixels that are somewhat isolated in parts of the image that are not actually green but form the transition from one color to another. We think this noise is introduced by the NTSC camera to digitizer process on the BucketBot as we do not see those pixel transition problems on other web cameras.
Regardless, to reduce this error we introduce a mean filter of size 12 to the processing stream. Huh?? The mean filter causes the image to become blurred. This blurring will reduce the spikiness of the spurious pixels and allow the RGBFilter to better focus on the actual ball! This blurring trick does have some correlation to the human visual system. It is theorized that the gaussian blur is an active component of our visual system. While not quite a gaussian distribution the mean or box filter provides a similar effect at a much faster frame rate. And you thought you needed glasses to see those precise edges?
Now that we can better track the ball even at distance we now have to understand when and how to move.
Keeping the ball at a distance
Now that we have our COG_BOX_SIZE variable we can arbitrarily chose 85 as the size that BucketBot should try to maintain (this equates to a couple inches from the ball). Doing so will require forward and backwards movement based on the relative size of the green ball or COG_BOX_SIZE. We also need to steer the robot to keep the ball in the center of the screen. This involves rotating the robot from right to left and moving the camera from up to down.
To create these movement commands we'll add the SSC module (the BucketBot uses electronic speed controls compatible with PWM signals created by the SSC) to move the robot. Note that the SSC module communicates to the SSC board via serial commands.
The SSC module will send two variables to the SSC board that range from 0 to 255 with 0 meaning reverse, 128 neutral and 255 full forward. The BucketBot has two motors that control the left and right wheels independently. (This is nice since it can rotate in one spot.) There is one more servo that controls the tilt of the camera that also ranges from 0 to 255 with 220 meaning the camera is pointed about straight. Our next task is to translate the COG_BOX_SIZE variable into motor commands from 0 to 255 for each motor and for the tilt servo.
Doing this translation will require a bit of logic. So we add in the VBScript Program module into the current processing pipeline. The VBScript module allows us to insert this program
' get the current center of the image
midx = GetVariable("IMAGE_WIDTH") / 2
midy = GetVariable("IMAGE_HEIGHT") / 2
' set the movement neutral range, i.e. if the
' cog is with range of the center of the image
' then consider it ok and move straigh. This
' helps to prevent fine tune movements that
' can cause oscillations.
range = 5
' determine the factor that scales image width
' to a range of 0 to 128 .. increase beyond 128
' if your robot turns too quickly
horizFactor = 200 / midx
' vertical factor ... we don't have much
' range here so the number is larger than
' horizontal movement
vertFactor = 300 / midy
' ball size when it is too close
ballSize = 40
' initialize our start motor values to neutral
left_base = 128
right_base = 128
' get the size (width or height) of the current
' bounding box
size = GetVariable("COG_BOX_SIZE")
' if it is equal to "" then no object was detected
if size > 10 then
' get the horizontal center of gravity found by the COG
' module
cogX = GetVariable("COG_X")
' if it is less than 75 the blob is on the left side
' of the screen so move that way
if cogX < (midx - range) then
left_base = 128-(midx-cogX)/horizFactor
right_base = 128
' otherwise move to the right if above 85 pixels (and no
' movement if 75 < cogX < 85 )
elseif cogX > (midx + range) then
left_base = 128
right_base = 128-(cogX-midx)/horizFactor
end if
' if the ball is too close then we have to move backwards
if size > ballSize then
left_motor = left_base+((size-ballSize)*2)
right_motor = right_base+((size-ballSize)*2)
' otherwise move forward
else
left_motor = left_base-((ballSize-size)*2)
right_motor = right_base-((ballSize-size)*2)
end if
' set the final motor values to be picked up by
' the SSC module
SetVariable "LEFT_MOTOR", CInt(left_motor)
SetVariable "RIGHT_MOTOR", Cint(right_motor)
' now lets work on the tilt ... grab the current
' tilt value
tilt = GetVariable("TILT")
' if it was not set then default to 220 (in our case
' this is horizontal to the floor)
if tilt = "" then
tilt = 220
end if
' if the blob is below 55 then tilt down up a bit more
' otherwise tilt up a little more
cogY = GetVariable("COG_Y")
if cogY < midy - range then
tilt = tilt - (midy-cogY)/vertFactor
elseif cogY > midy + range then
tilt = tilt + (cogY-midy)/vertFactor
end if
' we don't want to look up more than horizontal to the
' floor as we do not expect the
' ball to be on the ceiling
if tilt > 220 then
tilt = 220
end if
if tilt < 0 then
tilt = 0
end if
' and set that value for the SSC module too
SetVariable "TILT", tilt
else
SetVariable "LEFT_MOTOR", 128
SetVariable "RIGHT_MOTOR", 128
end if
The program first grabs our size variable COG_BOX_SIZE and compares it with what size we'd like to maintain in view. If the object is too big we move backwards by a relative amount or if the object is smaller than we'd like we move forwards. However, we also need to change the relative amounts for the right and left motors to ensure that we can rotate towards the ball as appropriately.
The LEFT_MOTOR and RIGHT_MOTOR variables that are set are then mapped to the left and right motors using the SSC module. Likewise, the TILT variable is mapped to the camera tilt servo. Note that they all range from 0 to 255. If you change the above equation to be more aggressive you need to ensure that the values stay within the 0 to 255 range.
BucketBot keeping a ball at a distance
 (3.9 MB) Video of the BucketBot from our perspective as it reacts to the green ball.
(3.9 MB) Video of the BucketBot from our perspective as it reacts to the green ball.
Please note that the following videos were taken on the bucketbot during processing so they are small.
 (1.9 MB) Video of the BucketBot as it sees the ball and adjusts by moving. This is the original
unprocessed video.
(1.9 MB) Video of the BucketBot as it sees the ball and adjusts by moving. This is the original
unprocessed video.
 (1.4 MB)
The processed video as performed on the BucketBot. The objective is to keep the
green ball in the middle of the screen!
(1.4 MB)
The processed video as performed on the BucketBot. The objective is to keep the
green ball in the middle of the screen!
Your turn ...
Want to try this yourself?
![]() Download the Object Tracking .robo file to run an example yourself.
Note that you need RoboRealm installed to run this file and an SSC servo controller to run the servo motors.
Clicking on any of the modules will bring up that interface and allow you to customize it for yourself. Try
getting the robot to track red objects ...
Download the Object Tracking .robo file to run an example yourself.
Note that you need RoboRealm installed to run this file and an SSC servo controller to run the servo motors.
Clicking on any of the modules will bring up that interface and allow you to customize it for yourself. Try
getting the robot to track red objects ...
The End
That's all folks. We hope you've enjoyed this little adventure into an application of machine vision processing. If you have any questions or comments about this tutorial please feel free to contact us.
Have a nice day!
| New Post |
| Color Tracking Related Forum Posts | Last post | Posts | Views |

Here is the working vbscript It work amazingly great for multiblob tracking and triggering. I found very tricky to work with it.... |
13 year | 12 | 5989 |

Hi I'm actualy working in a university to make the implantation of the vision in the robotic labor... |
13 year | 3 | 4569 |
|
Object trackng school project
Hi, i'm a student and i have to make a project. I have to make a large robot that automaticly follows me, and i t... |
13 year | 6 | 3831 |
|
tracking ball- outputing positional data
Hi Id like to be able to output the x,y positional coordinates for tracking an object, eg green bal... |
13 year | 2 | 4156 |

First time trying software out and am trying to follow the color tracking tutorial. What I would like to do is a little simpler... |
14 year | 13 | 10172 |
|
Hi, When I try to run the code attached , and disable the Lynxmotion_SSC, the code seems to run ju... |
14 year | 3 | 3842 |