
Mosaic
The Mosaic module demonstrates the multi-camera functionality of RoboRealm in that each camera can be configured to occupy a certain block within an image mosaic. Using the Mosaic module you can arrange each camera in a lightbox type arrangement of your choosing.
Interface
Instructions
1. Composition - Select the appropriate image to display in the corresponding block within the composed mosaic image. The default selections are
2. Image Size - Select the size of each of the images to be used in the mosaic image. This will auto-populate the width and height sizes below.
3. Resize - Select the scaling technique that is to be used. Pixel resize
is faster and is sharper than other techniques but can cause jaggered
edges on high contrast lines. Bilinear resize will use linear
interpolation to determine the actual resulting pixel values. This
technique is slower but will create smoother more pleasing results.
4. Aspect Ratio - While editing either the pixel size or percent size the module will adjust the width and height to keep the same aspect ratio. To remove this restriction uncheck the "Maintain Aspect Ratio" checkbox.
Example
| 4 camera view | 2 camera view |
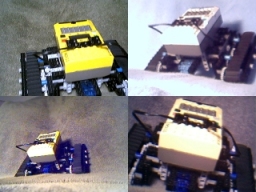 |  |
The above example shows 4 cameras looking at the Lego Mindstorms RCX robot. Note the color and quality difference between the images. The second image shows a larger two camera view of the same scene (scaled down for web viewing).
Note - multi-camera view is ONLY available for DirectX compatible devices. VFW does not generically support multiple camera devices and is therefore not compatible with using more than one camera at a time.
Speed considerations
For large images you may want to ensure that the resulting image size per composite block is a factor of 2 of the original image. Scaling by a factor of 2 will result in better performance and higher quality results (i.e. for factors of 2 pixel and bilinear modes produce the same results).
See Also
Linear Scanner
Display Image
Align Image
| New Post |
| Mosaic Related Forum Posts | Last post | Posts | Views |
|
3 camera output on single screen
In my application, I am using 3 camera. I need three camera windows open simultaneously. | 4 year | 3 | 3523 |
|
Hi RR-team, I'm close to being entirely happy - just one problem remains unsolved - yet. | 12 year | 2 | 3547 |
|
The uploaded robo file when loaded directly into RR work fine. When the same file is read into my C++ program and transferred to... |
13 year | 9 | 4047 |
|
Using Multiple USB Web Cam in Win XP
I tried to run multiple USB web cam under XP SP3. The first camera works but the second always gets an error that it cannot run.... |
13 year | 4 | 4396 |
|
Overlays on multiple camera views
I have two camera views that are shown simultaneously. On each of the camera views, I would like to draw a different overlay on... |
13 year | 3 | 3658 |
|
Mosaic Function
Steve, The 240x180 Image Size for Mosaic doesn't appear to show images properly - there is some ty... |
15 year | 9 | 5096 |

Every few months I come back to this, since I feel that stitching together multiple images would be a great way to increase fiel... |
17 year | 6 | 5803 |