|
visual line following
David [14 posts] |
11 year
|
hi steven
I see the tutorial but I don't understand some function.
if i want to check out the defect of the line to give out the signal of "defect" text, it's use display variable?

|
|
|
|
David [14 posts] |
11 year
|
also i don't understand the VBScript in line following in tutorial
can somebody can help me, thank you
below is the VBScript in line following
x = GetVariable("COG_X")
y = GetVariable("COG_Y")
cx = GetVariable("IMAGE_WIDTH") / 2 why it need to divide by 2
cy = GetVariable("IMAGE_HEIGHT") / 2 why it need to divide by 2
xoff = GetVariable("IMAGE_WIDTH") / 8 why it need to divide by 8
yoff = GetVariable("IMAGE_HEIGHT") / 16 why it need to divide by 16
also x < cx - xoff means?
if x < cx - xoff then
if y < cy - yoff then
move = "pivot left"
else
move = "left"
end if
elseif x > cx + xoff then
if y < cy - yoff then
move = "pivot right"
else
move = "right"
end if
else
if y < cy - yoff then
move = "backup"
else
move = "straight"
end if
end if
SetVariable "move", move
|
|
|
|
Carl from United States [18 posts] |
11 year
|
David,
cx = GetVariable("IMAGE_WIDTH") / 2
Finds the horizontal center of the image.
cy = GetVariable("IMAGE_HEIGHT") / 2
Finds the vertical center of the image.
xoff = GetVariable("IMAGE_WIDTH") / 8
Finds the sensitivity cutoff for horizontal (left/right) correction.
yoff = GetVariable("IMAGE_HEIGHT") / 16
Finds the sensitivity cutoff for vertical (forward/backward) correction.
if x < cx - xoff then
Determines if we need to go to the left, since it's checking
if x (COG_X) is less than the difference between the horizontal
center of the image and the sensitivity cutoff for left/right
course change. This makes sense if you remember that the zero
coordinates (x=0 and y=0) are at the bottom left corner of the image.
Display_Variable shows the value of a variable on screen, but
it doesn't determine the presence or absence of a defect.
I'm unsure of the best way of detecting the defect, STeven is
sharper about such things than I am. :)
Cheers,
Carl
|
|
|
|
David [14 posts] |
11 year
|
thank you Carl
after seeing your comment i think i understand the program
|
|
|
|
David [14 posts] |
11 year
|
Also i want to add the detection to detect green light ,yellow light, red light to give out the signal
"go", "prepare to go /stop" " stop" respectively.
i seen the same post http://www.roborealm.com/forum/index.php?thread_id=1308
that when open it give out the warning
how to fix it in uploads image
also should i use color detection to detect the light?better?
could everyone can help me, thanks a lot

|
|
|
|
David from Hong Kong [1 posts] |
11 year
|
it is possible to do?
thanks a lot
|
|
|
|
Carl from United States [18 posts] |
11 year
|
Firstly for the file - when you acknowledge the error and close
that window just do a save. When you reload it it works fine
although you'll want to set your camera if you're going to test.
As for adding the yellow light, it's not particularly difficult, you
can simply copy what was done for the red and green lights,
and in the RGB_Filter module of the copy change the setting
to yellow and the assignment of traffic_signal to your
prepare to go /stop.
|
|
|
|
David [14 posts] |
11 year
|
thanks a lot
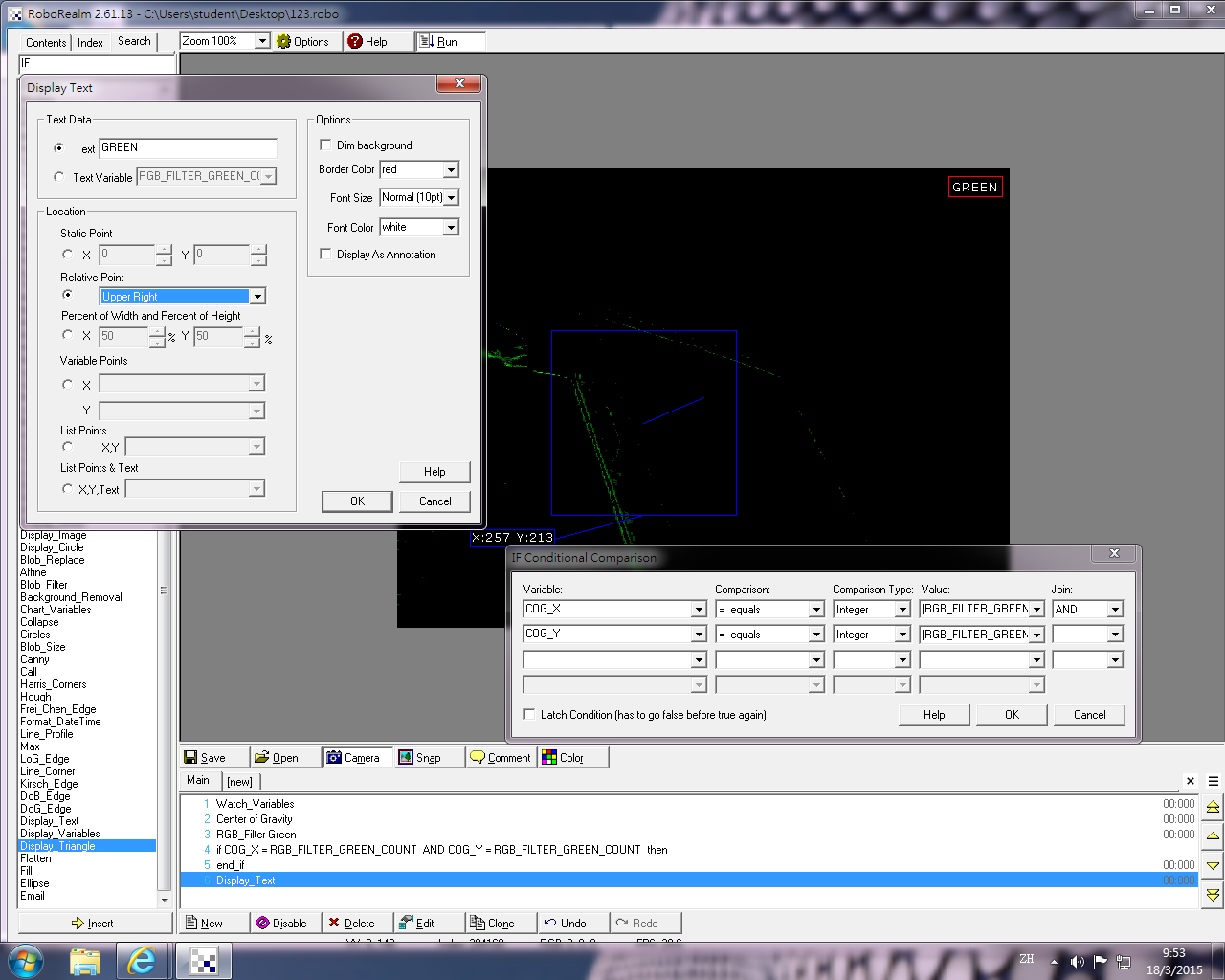
but i want to add the if statement to check out if the green light is detected, the outcome will show a text " go" otherwise it will not give out any display
i don't understand the if statement
show i use setvariable function

|
|
|
|
David [14 posts] |
11 year
|
also i want to add the function to calculate the angle
it is suitable ?
could someone can give me a suggestion. thank you.

|
|
|
|
Carl from United States [18 posts] |
11 year
|
As for the first question, the easiest explaination is
the attached robofile. The modules have appropriate
comments so it's hopefully fairly obvious. Among the
problems with what you tried is that you're comparing
a position with a count, which doesn't give a meaningful
answer. The Blob_Filter module is what allowed the
earlier version to distinguish between a traffic light
and other arbitrary things once color was handled.
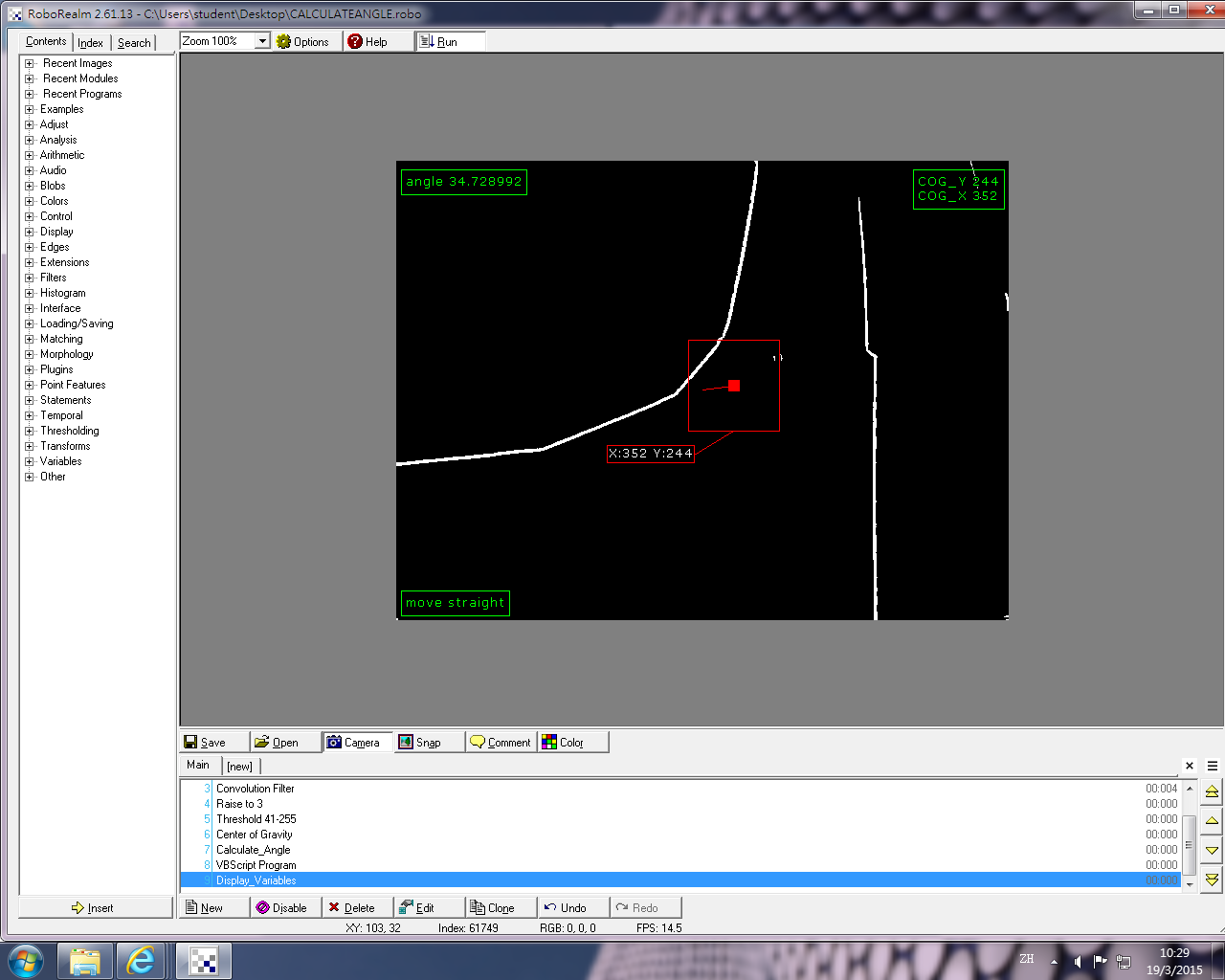
As to the second question, you have a few problems in
your setup. The Calculate_Angle module needs the values
produced by the Center_of_Gravity module, so for correct
results it should be in the opposite order in the pipeline.
The modules in the pipeline execute once per frame from the
camera, and do so in the sequence in which you placed them.
I can't say what your VBscript program is doing beyond
probably calculating move since its content is not exposed,
but in the Calculate_Angle module you're using it for both
XEnd and YEnd which doesn't make sense either.
 program.robo program.robo
|
|
|
|
David [14 posts] |
11 year
|
Carl,
for the second question, I use the tutorial(visual line following) to add the calculate_angle function
MY target is that use the camera to detect the Electrical tape
--------------------------------------------------------------------------------------
x = GetVariable("COG_X")
y = GetVariable("COG_Y")
cx = GetVariable("IMAGE_WIDTH") / 2
cy = GetVariable("IMAGE_HEIGHT") / 2
xoff = GetVariable("IMAGE_WIDTH") / 8
yoff = GetVariable("IMAGE_HEIGHT") / 16
if x < cx - xoff then
if y < cy - yoff then
move = "pivot left"
else
move = "left"
end if
elseif x > cx + xoff then
if y < cy - yoff then
move = "pivot right"
else
move = "right"
end if
else
if y < cy - yoff then
move = "backward"
else
move = "straight"
end if
end if
SetVariable "move", move
---------------------------------------------------------------
the "move" is from VBScript
start point is in "Cog_x" & "Cog_y" XEnd and YEnd should select?
 
program.robo
|
|
|
|
Carl from United States [18 posts] |
11 year
|
David,
The result in move is not a number, so trying
to use it as one doesn't work. And although
CAMERA_PATH may sound promising by name it's
not a number either, it's the usb device path
of the camera that you are currently connected
to. When in doubt as to what a variable really
contains Watch_Variables is a convenient way
to find out.
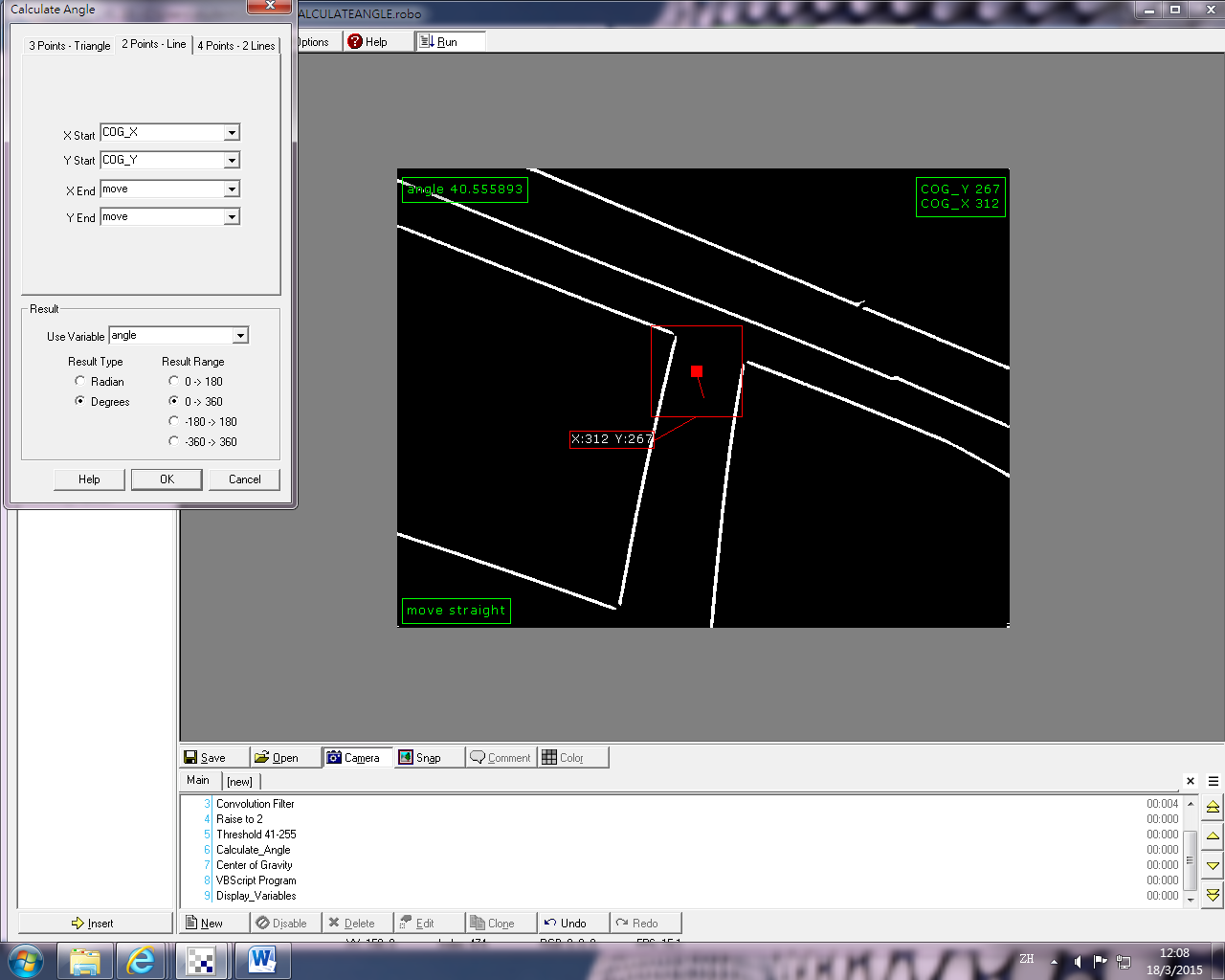
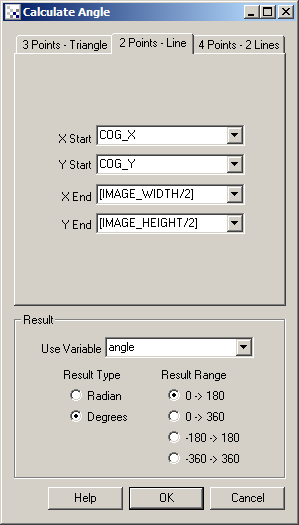
Since you're trying to get the angle between
the camera's center of view and the COG, you'd
use half the image dimensions much as you did
in the VBscript file. The simplest way is to
fill in the fields of the Calculate_Angle module
with XEnd being [IMAGE_WIDTH/2] and YEnd being
[IMAGE_HEIGHT/2] as shown in the attached photo.
Text field expressions are often useful, see
http://www.roborealm.com/help/Expressions.php

|
|