|
Route Recorder
Ben Graham from United States [17 posts] |
15 year
|
I was wondering if there is anymore information on the Route Recorder module? It is in RoboRealm but there is no explanation or anything about how to use the module on the documentation page.
Thank you very much,
-Ben
|
|
|
|
EDV [328 posts] |
15 year
|
I hope you speak about AVM Navigator plugin:
http://www.roborealm.com/help/AVM_Navigator.php
I plan to share some emulator program (based on Quke 3 mod) for acquaintance with "Marker mode" and "Navigate by map" modes.
http://www.youtube.com/watch?v=9opAZYRsDxU
But unfortunately this emulator is not ready for publishing yet.
So, let’s try to use this modes directly on real robot (step by step).
1. Connect your robot to AVM Navigator:
Just use the variables that described below for connection of your robot to AVM Navigator:
Use variable NV_TURRET_BALANCE for camera turning: NV_TURRET_BALANCE - indicates the turn degree amount. This value range from -100 to 100 with forward being zero.
Use for motor control NV_L_MOTOR and NV_R_MOTOR variables that have range from -100 to 100 for motion control ("-100 " - full power backwards, "100" - full power forwards, "0" - motor off).
If you use Lego NXT platform then you should just adjust variables NV_L_MOTOR and NV_R_MOTOR to the range of NXT parameters (motors range from 0 to 255 with 128 being neutral) by VBScript:
http://www.roborealm.com/forum/index.php?thread_id=4086#
|
|
|
|
EDV [328 posts] |
15 year
|
2. Call the dialog window of AVM Navigator (click on it at video processing pipeline) and then switch to “Nova gate mode”. Now you can control your robot by arrow keys and also you can turn robot camera by "Delete" and "Page Down" keys ("End" key will set the camera in front position).
3. Move your robot to the start position. In this position will be placed origin of navigation map.
4. Reset markers data information by click at "Clear/mark data" (if it needed).
5. Switch to "Marker mode" and then you should manually lead the robot along a route.
6. In the end of route you should switch to "Nova gate mode" and then save route data (click "Save") to the file that will has different name with default "avm.dat".
7. Return to the start position and switch to "Navigation by map" mode then you should point robot to the target position at the navigation map (click the left mouse button on the map) and robot automatically will navigate to this point.
You should repeat items 2-6 several times for good detailing of navigation map.
|
|
|
|
Ben Graham from United States [17 posts] |
15 year
|
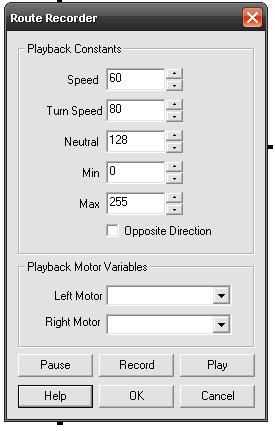
No. I am talking about the Route Recorder module.
A picture of the module is attached.

|
|
|
|
Anonymous |
15 year
|
Ben,
that's an alpha module (not yet released) that is in the RR download for specific clients to test. As it is not released yet no documentation nor official release has been done for this yet. I'd recommend EDV's advice and have a look at the AVM module which contains a similar technique to the route recorder.
STeven.
|
|