|
maze solving
Anonymous |
18 year
|
hey it seems they are doing it using image procesing to try and reach the red blob..... can something like be done using RR
http://video.google.com/videoplay?docid=2578610004639019941
thnks....
|
|
|
|
over head camera
Anonymous |
18 year
|
hey it seems most over head camera based robots uses two markers on the top of the robot, to find its orientation bt i too am baffled how this is done... if i have simple rules like left, right ,forward and backward robot control how do we find how much to turn to face a target and always keep the front of the robot facing it .
though target following using onvoard camera is easy( a tutorial is also given) using over head camera seems diificult.
any help will be welcome
|
|
|
|
Anonymous |
18 year
|
Yes, we can do something very much like the video ... in fact check out our new tutorial at
http://www.roborealm.com/tutorial/Path_Planning/slide010.php
that I think will answer some of your questions.
STeven.
|
|
|
|
maze!!!!
Anonymous |
18 year
|
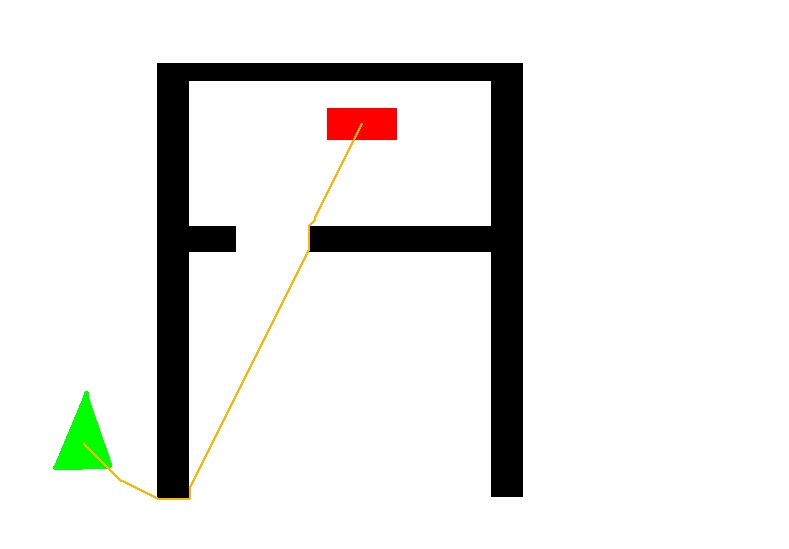
hey... steven i am really impressed by the path planning module...
i tried it out on a simple image and the results as given below are awesome... but for one thing..
when the robot will follow this it will actually keep hitting the black(obstacles)... is there any way o move the planned path a bit away so that we stop hitting the wall(obstacle)...
thnks....

|
|
|
|
Anonymous |
18 year
|
Yes, add an erode module before the path planning and it will enlarge the black area. If you erode enough the black area will grow to the size needed to avoid hitting it. This is a common technique in path planning where you grow the obstacles by the size of the robot and then plan the path. Happens to work quite nicely from a visual perspective. Note that this will also encode doorways that are not wide enough for the robot to fit through.
STeven.
|
|
|
|
Anonymous |
18 year
|
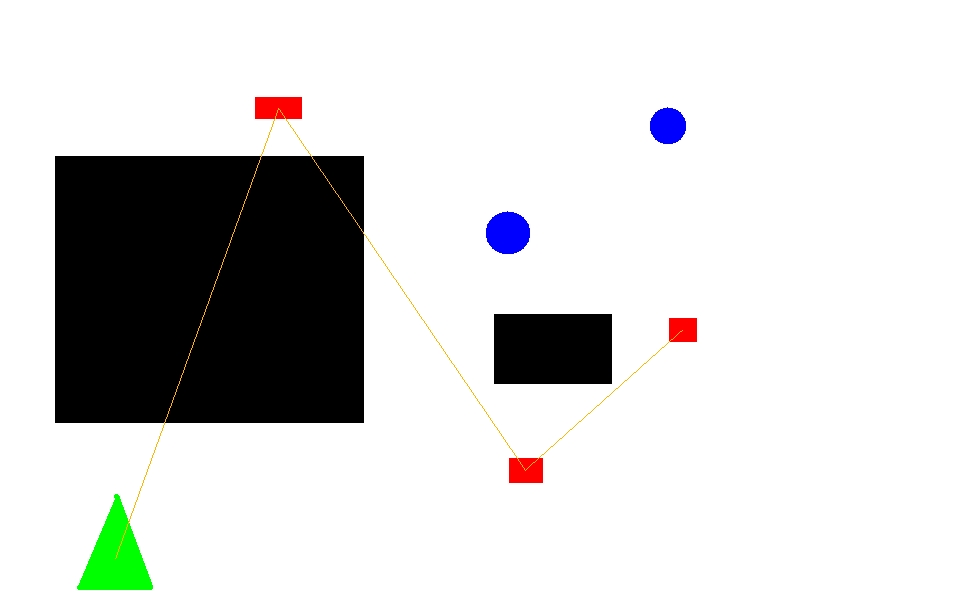
hey.. a few notes..
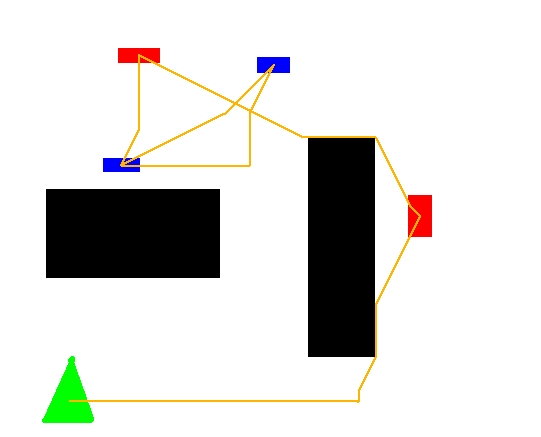
the path planning seems to work fine wiith shortest path,
but once i add the obstacles... the path doesnt seem to be right as shown in the picture..
also suppose there are way points of different color and i want to know ... the color of the way point visited.( suppose we have a variable called color which will show the color of the next way point visited)
is some thing like this possible....
thnks



|
|
|
|
Anonymous |
18 year
|
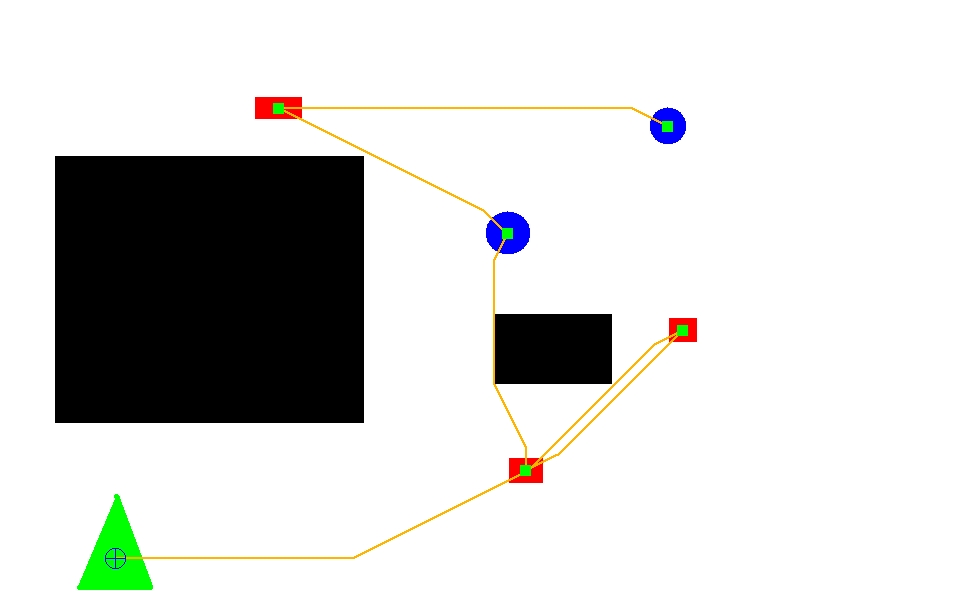
|
hey if u see the last pic..... it seems one way point was visited twice....
|
|
|
|
Anonymous |
18 year
|
Can you post the original image without any of the path planning and we'll try to replicate your results.
Also, if you have the robofiles handy that produce those configurations that would be nice too.
Thanks,
STeven.
|
|
|
|
maze solver
Anonymous |
18 year
|
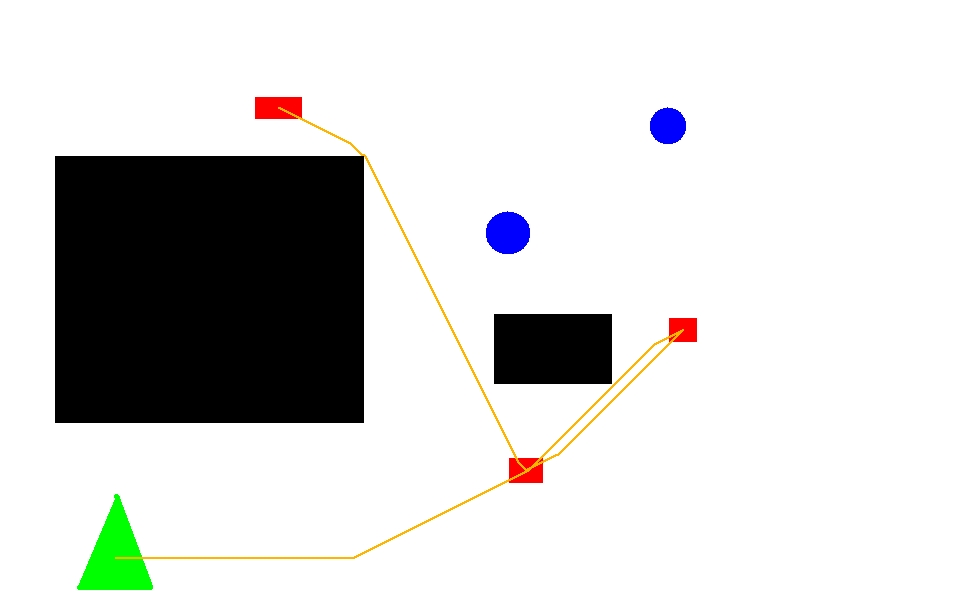
hey.. here is the picture
also if you could put in some way as to the color of the way point being visited it would help us a lot.... so that suppose we reach, a particular way point.. we could do some thing there... may be light a LED(red) for a red way point... if we colud have a variable.. may be we could send it out as data...
thnks.....
 program.robo program.robo
|
|
|
|
Anonymous |
18 year
|
here are the pic


|
|
|
|
Anonymous |
18 year
|
Ok, the most recent update (today) has a bunch of fixes in this area. We tested all your images and things seem to be much better. Can you download 1.8.2.0 and retest your images?
Thanks,
STeven.
|
|
|
|
dark from Indonesia [1 posts] |
15 year
|
If require IR or Leser sensor for detect wall?
How I am use camera sensor only?
|
|
|
|
Anonymous |
15 year
|
|
|