|
traffic light detection
David [14 posts] |
11 year
|
hi everyone,
i want to use webcam to detect the green light, yellow light, red light and then give the signal "go" "prepare to go/stop" and "stop"
when i search other post which related about this detection as a reference.
such as this link http://www.roborealm.com/forum/index.php?thread_id=1308
it said that
how to fix it
thanks a lot

|
|
|
|
David [14 posts] |
11 year
|
|
Also it is same as color detection?
|
|
|
|
Carl from Your Country [1447 posts] |
11 year
|
David,
Attached is the updated robofile. The RGB filter module also needed an update.
Yes, it is very much color detection. The strategy here is too look for specific colors that are somewhat round and large enough to be relevant.
You will need quite a few more images if this is to be extended to a generic system as the current robofile really only works on the images mentioned as a guide to getting started.
STeven.
 program.robo program.robo
|
|
|
|
David [14 posts] |
11 year
|
hi steve,
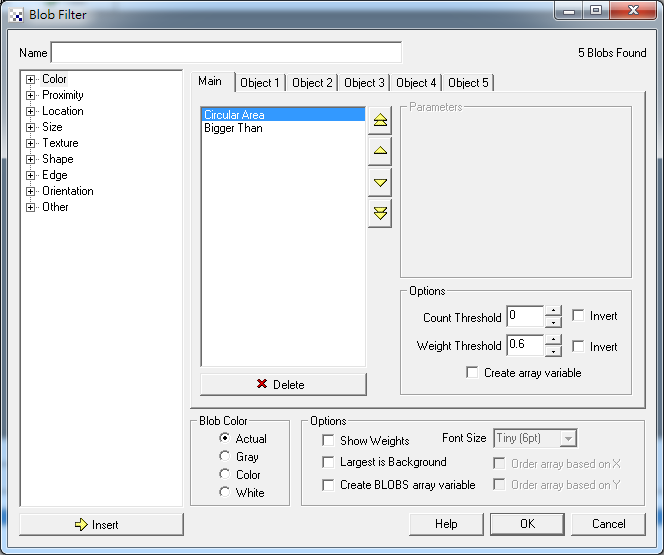
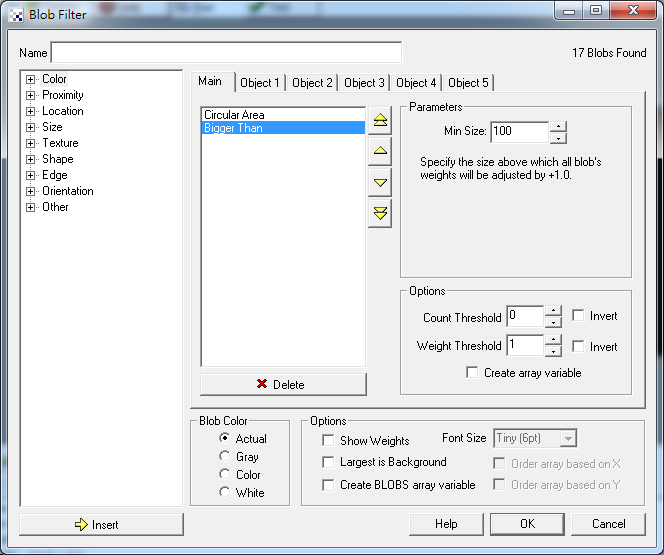
regarding the blob filter, i don't understand " circular area " & bigger than"'
in RGB filter RED
circular area : weight threshold is 0.6 "why is 0.6?"
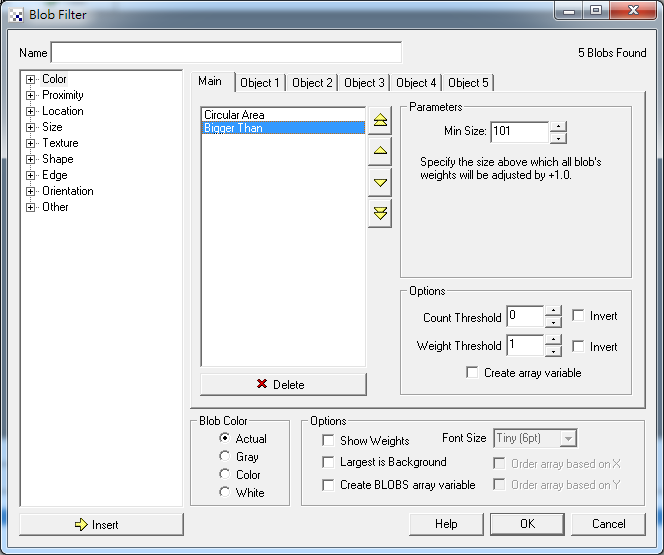
bigger than : the min size is 101 " that means?" and the weight threshold is 1 ??
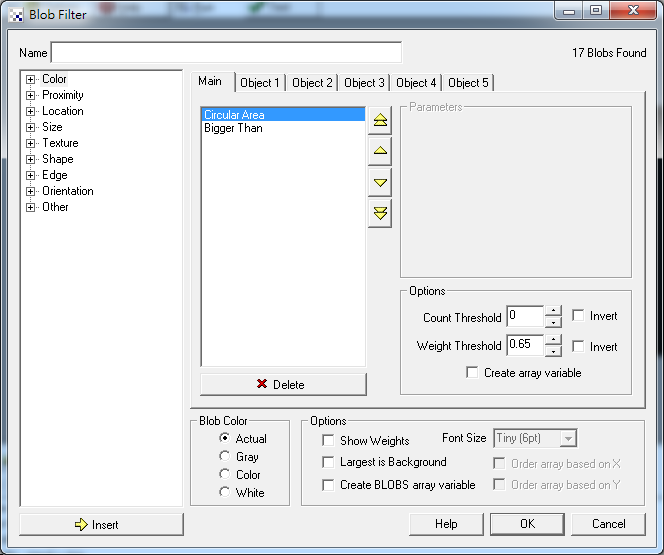
in RGB filter RED
circular area : weight threshold is 0.65 "why is 0.65?"
bigger than : the min size is 100 " that means?" and the weight threshold is 1 ??
see the upload image.
and also if i want to real time to detect the light that is use above methods ??
see the upload image
thanks, david
    
|
|
|
|
Carl from Your Country [1447 posts] |
11 year
|
David,
If you review the blob filter documentation at
http://www.roborealm.com/help/Blob_Filter.php
that should help explain what the value are. The actual values used just appeared to work for your images and are not necessarily directly related to a specific image. They were empirically determined by testing your images. This is why many more images are needed to ensure that the values are actually the right ranges.
I'm not sure what you mean by "real time to detect the light". Could you clarify?
STeven.
|
|
|
|
David [14 posts] |
11 year
|
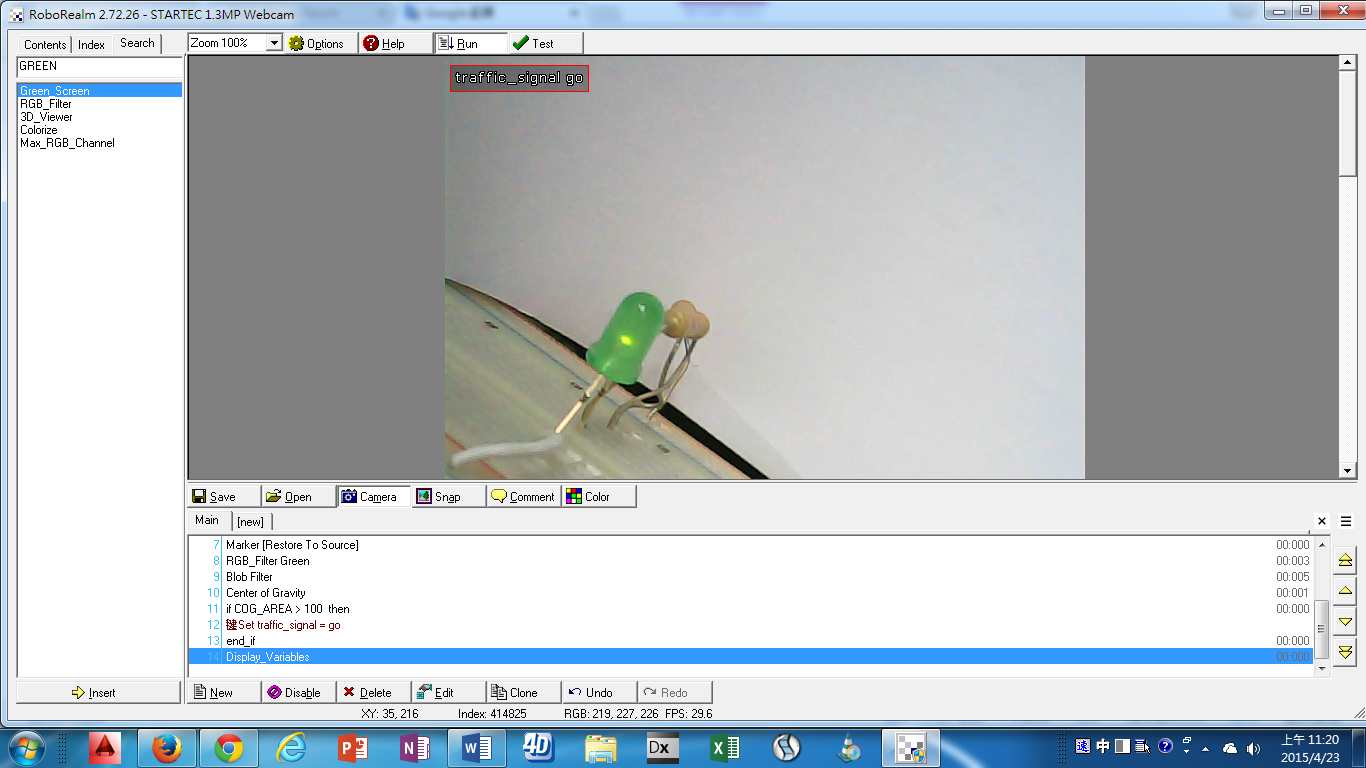
" real time to detect the light"
i means that use the camera to detect it because the method for detect the traffic light is a image before
for the below image is use the camera in real time but when i try to detect it is not focus the GREEN LED

|
|
|
|
Carl from Your Country [1447 posts] |
11 year
|
David,
I think we have a communication issue ... your description is very difficult to understand. What I think you are asking is how to just detect the GREEN LED? If so, then the LED is NOT round like a traffic light and thus gets eliminated by the filter.
Instead, just click on NEW pipeline, add the RGB_Filter and select the green color checkbox [] Green.
STeven.
|
|
|
|
Anonymous |
11 year
|
steven,
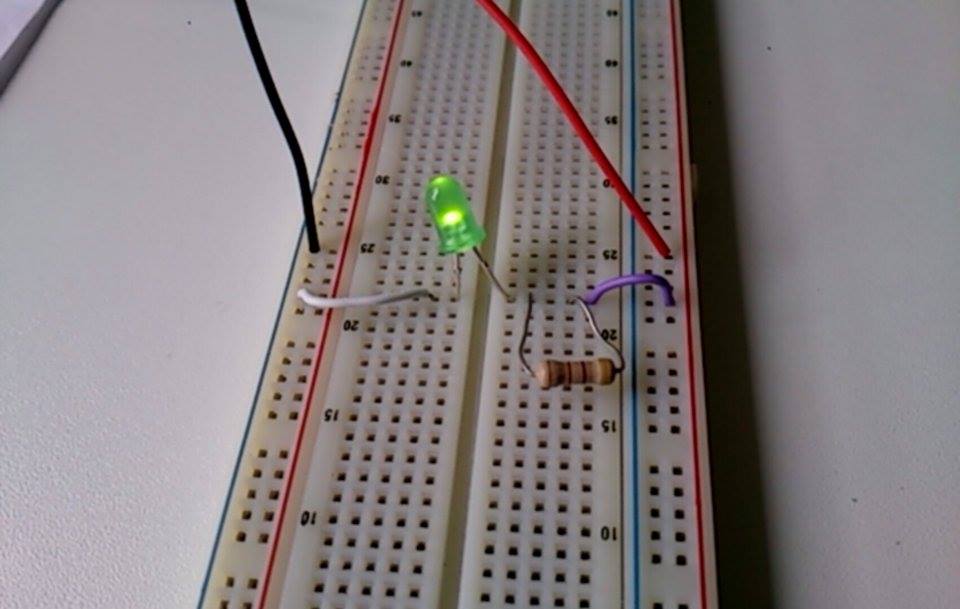
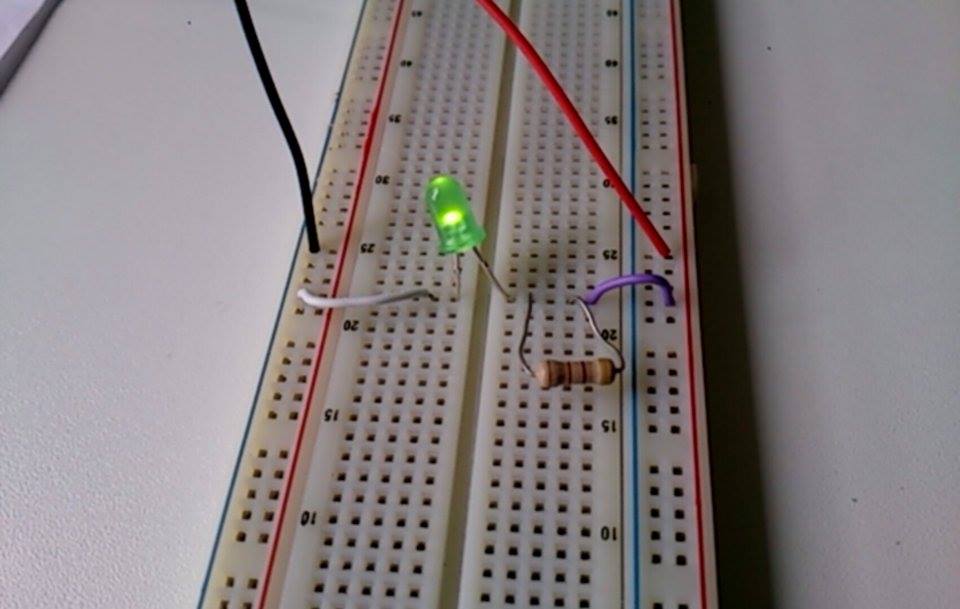
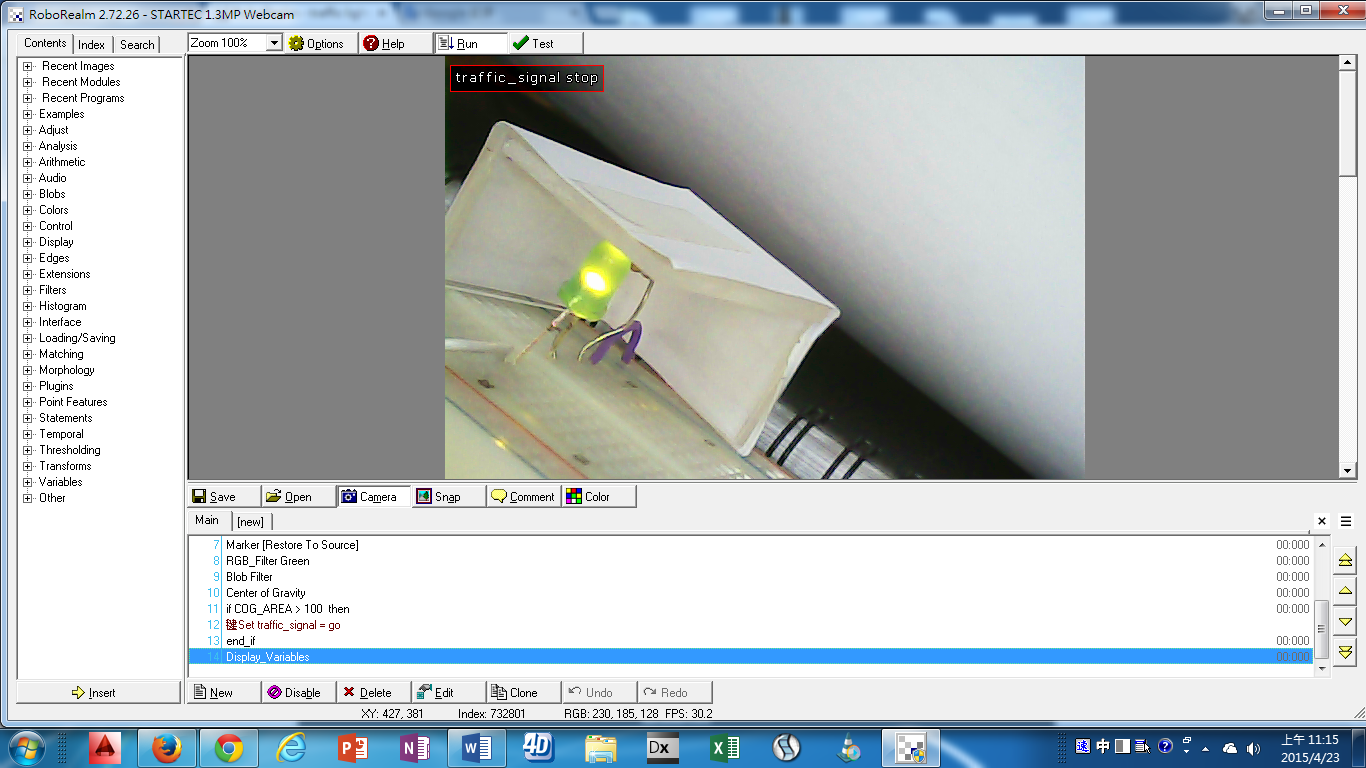
sorry for my poor communication. if i want to test the LED
show below in the upload file
between 2 picture, it can see that one of the picture is detect and give out the "go" signal.
it is the around lighting affect the detection?or other problem affect?
 
|
|
|
|
Carl from Your Country [1447 posts] |
11 year
|
The trick to detecting LED's correctly is to switch you camera exposure to a really short time. Or set your shutter speed to very fast. This will make the entire image MUCH darker but you will still see JUST the LED in the image when it is turned on. That will make this much easier to process.
The problem is that the LED light is overexposing the camera's pixels and causing the 'green' light to appear white when it should just be green.
STeven.
|
|