Hi,
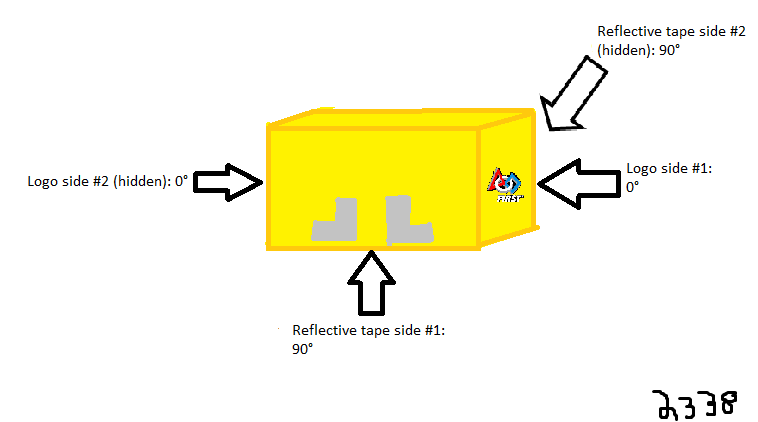
Using the Visual Targeting tutorial found on http://www.roborealm.com/FRC2015/Visual_Targeting_RGB.php, I have successfully tracked yellow totes using a Microsoft Lifecam HD-3000 webcam with a polarized lens over it in order to block out some glare. However, I would like to take tracking yellow totes a step further and attempt to calculate the angle the robot must align itself in order to pick up the totes. For example, if the robot's camera faces the logo of the yellow tote (any side), RoboRealm should show the angle of contact to be closer to 0 degrees. If the robot's camera faces the reflective tape of the yellow tote (any side), RoboRealm should show the angle of contact to be closer to 90 degrees. As the robot turns from the logo to the reflective tape, the angle measurement should change slowly from 0 degrees to 90 degrees. Attached is a visual image of what I am trying to describe. Also attached are some IRL images of the yellow tote and the .robo file I am currently working with. How would I approach this problem?
Best regards,
Gear It Forward (Team 2338)
  
 program.robo program.robo
|
|