Hi,
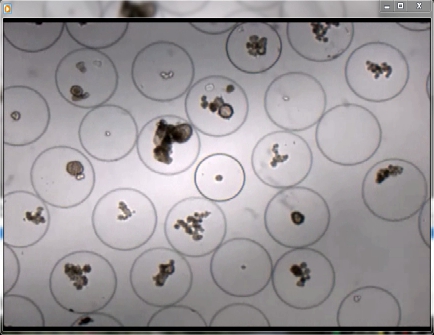
I am trying to detect if the circles are empty. Commonly there are blobs inside the circles, but I would like to know if the circles are empty or the size of the blobs. My approach is to first detect the circles and use that as a mask/identifier and then to look for blobs.
First, I'm having some challenges getting the circles. I have to misuse the adaptive_threshold module instead of edge detect modules in order to be able to use the circle module. Then, I mask and invert the source image to remove everything outside the circles to then deal with the blobs. I could use some help in this step.
Is there a better approach to this, as it seems a little excessive?
Thanks,
Nemanya

|
|