|
Jerky Servo Movement:
Nonnef from United States [2 posts] |
13 year
|
I'm trying to control a servo with a potentiometer, but as I turn the pot the servo will jerk every few degrees until it gets to its destination.
This only happens when I try and use the pot. If I control the servo via the modules slider or a joystick it works fine.
I have both the pot and the servo wired onto an Arduino Duemilanove to try and eliminate all the variables of what might be wrong, and have the robo file boiled down to bare basics (which I've included), and it's still doing it.
I've tried different servos, different boards (an SSC-32), different pots, and it always does it. Making me think I'm doing something wrong in Roborealm. But with only two basic modules left I'm not sure what it could be...
 program.robo program.robo
|
|
|
|
Anonymous |
13 year
|
|
|
|
|
Nonnef from United States [2 posts] |
13 year
|
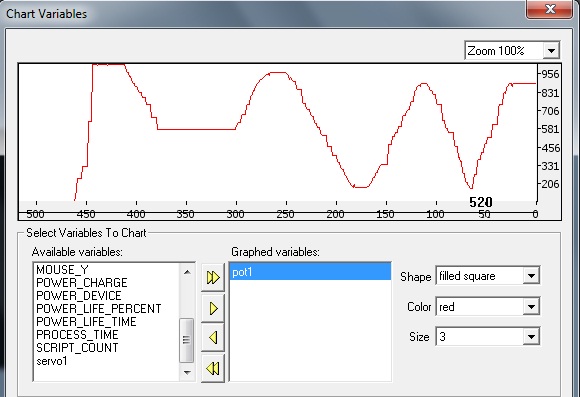
When I chart out the variable I can see what I assume is noise, as it corresponds directly to the jerks in the servo movement. I've included a picture of it, just to make sure I'm not reading it wrong.
I've been playing around with the filter module but haven't figured out how to filter the noise out with it. But being I know where to start I can play with it now.
Also going to try a low-pass filter if I can't figure out the filtering module, thank you for that link.
I appreciate the help, Steven!

|
|