|
I try to find best solution for robot navigation. Need ideas.
Anonymous |
14 year
|
Hello All!
Here, in Russia, we have robotics competition called Robofest.
One of the tasks of this competition - "Defile"
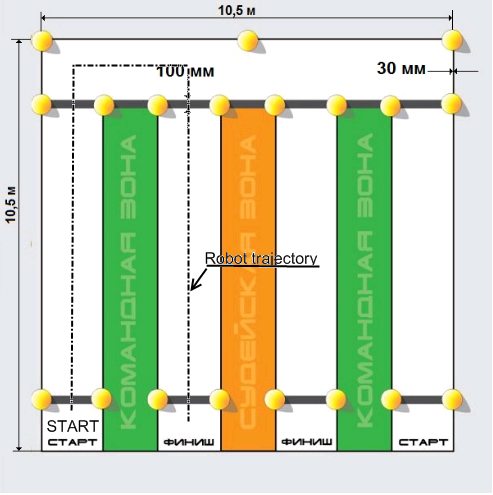
Robot must go inside track marked with black lines stay inside of two lines.
Floor surface white. Lines are black.
In image i show area of competition plan and desired robot path.
How i can use RoboRealm to slove this task?
I fully new in computer vision technology.
thanks. Sorry my bad English.

|
|
|
|
ronn0011 [73 posts] |
14 year
|
Hey, you may looked into this tutoria: http://www.roborealm.com/tutorial/line_following/slide010.php
, First of all: Can you provide more rules on the competition, If the size of robot matter, or what types of drive: Differential drive or hexapod robot, humanoid or any
If size of robot does not matter you is half way through, just ensure there is sample program for specific types of microcontroller you are using.
You need wa program at your microcontroller to communicate with Roborealm
|
|
|
|
Anonymous |
14 year
|
Rules:
1. Robot maximal dimension 800x800x1000 mm LxVxH
Our robot have 650x800x300
2. differential drive with encoder feedback using ROBOTEQ DC motor controller as power amplifier and NI SingleBoard Rio as main controller. Also we can use any kind of PC - laptop, notebook mounted on mobile robot or stay outside area and hawing communication with robot using WiFi. Also we can use any types of cameras
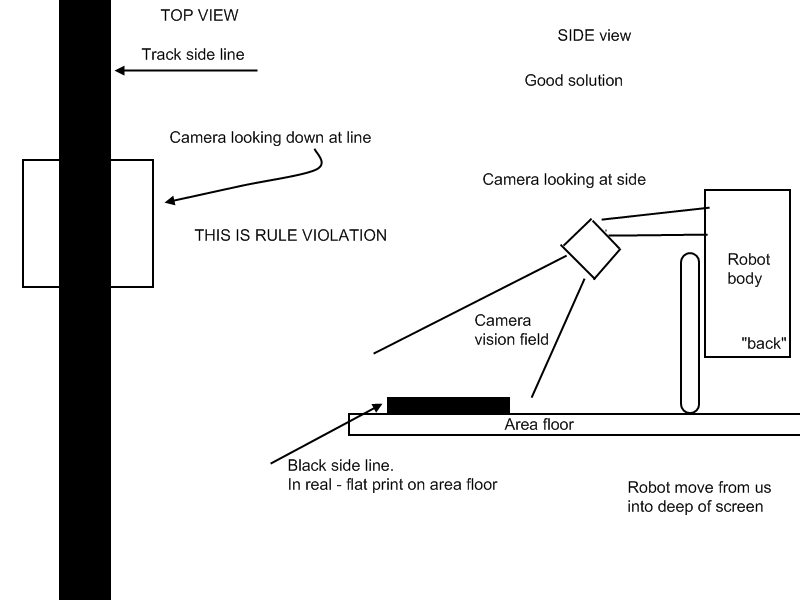
3. No one of parts of robot can cross side lines of track.
Important - we can use camera looking down at line. I add image to illustrate this rule.
And possible to use a side looking camera.
Total processing chain as i see:
PC or Notebook with RoboRealm processing a image of track - then transmit some date to serial port. In LabView we write special code - the parser to process this data and make correction of robot movement.
So i can chose a optimal image processing sequence because i don't have a big RoboRealm experience

|
|
|
|
Anonymous |
14 year
|
Yes, the line following tutorial is where you should start.
The first task would be to get an actual image of the line as close as possible to the competition. Lighting, color, etc. will all effect the ability to detect the line so having a real image close to what you would expect on the robot is needed in order to verify that the line following tutorial solution also works with what you have.
STeven.
|
|