|
Shape match and orientation... difficulties
Pete [6 posts] |
19 year
|
Hi,
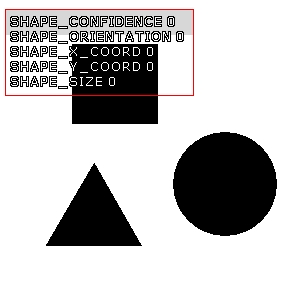
I'm trying to find a triangle's location and orientation using shape match. I started with a simple picture.

Used a piece of it as the shape to use for matching.

Trained the module by picking the folder that only contained the triangle.

And ended up without any readings.

Would someone be kind enough to have a peek at the attached program and let me know if it looks somwhat correct?
Thanks!
Pete
 program.robo program.robo
|
|
|
|
Shape Matching Updates
Anonymous |
19 year
|
Pete,
It seems that you are on the right track but your image colors are reversed. RoboRealm uses white objects on black backgrounds for shape matching. You can either add in a negative module to switch the intensity around or use other graphic programs to do the job.
If you switch them around it should work much better! And also download RR again as we just really added a lot of fixes and new features to that module.
STeven.
|
|
|
|
Anonymous |
14 year
|
Steven,
i'm developing four steering wheel robot as link below.
www.youtube.com/watch?v=FkF4LsNMJyU
But I'm using camera instead of infrared sensor. My robot will detect shapes and move based on shapes information. What I should do to makes my robot move based on the information from the shape?
What I have done are:
1) color filter
2) shape match module.
What should I do after that modules?
|
|
|
|
Anonymous |
14 year
|
|
|
|
|
Anonymous |
14 year
|
Steven,
can i use both COG Module and shape match module for shape detection and recognition?
-Wan
|
|
|
|
Anonymous |
14 year
|
Steven,
I got 7 shapes but same color to be detect and recognize.
-Wan
|
|
|
|
Anonymous |
14 year
|
Steven,
Firstly my robot need to find shape out seven shapes. (The shapes is green color and have command of movement e.g. left, right and etc). Next after the robot found one of the shape, need recognized and move based on the command.
What is the steps require?
steps:
1)RGB Filter module
2)COG module
3)Shape match module
4)VBScript
it is correct?
-Wan
|
|
|
|
Anonymous |
14 year
|
Steven,
for your information, the robot is an unknown environment.
|
|
|
|
Anonymous |
14 year
|
Wan,
You should be able to get the COG from the results of the shape match.
If you post a couple sample shapes (i.e. shape templates) and an image of what the robot may see and the robofile (i.e. saved RR configuration) you currently have we can better answer your question.
STeven.
|
|
|
|
Anonymous |
14 year
|
Steven,
I've attach the file. What should I do next?
-Wan
|
|
|
|
Anonymous |
14 year
|
Steven,
I've attach the file. what should i do next? am i on the right track? thanks.
-Wan
|
|
|
|
Anonymous |
14 year
|
|
|