|
Point Cloud Analysis
from Australia [87 posts] |
18 year
|
Hi STeven,
I'm playing around with a home made laser scanner with RoboRealm anaysis. It seems to work rather well. After getting a point cloud of the surface, I would like to do some morphological analysis. Do you know of any freeware that I can use for point cloud analysis.
Regards,
Cameron
|
|
|
|
Anonymous |
18 year
|
What kind of point cloud analysis are you thinking of doing? This is perhaps something we add to RoboRealm. If you can be more specific with example images (i.e. what you have, what you'd like to have) we can potentially work something up.
STeven.
|
|
|
|
Anonymous |
18 year
|
Hi Steven,
Here are the data points for a roll being scanned. The txt file contains 3 columns of data. By plotting it on 3 axis you can see the 3D details. The .fig is a MATLAB file of the 3D point cloud.
I am thinking of using fuzzy logic to locate clusters, but most of the similar problems only deal with 2D data.
Any form of segmentation of the point cloud would be great, as the final idea is to distinguish targets even if they are of similar color.
Thanks
|
|
|
|
Anonymous |
18 year
|
Hi Steven,
Here are the data points for a roll being scanned. The txt file contains 3 columns of data. By plotting it on 3 axis you can see the 3D details.
I am thinking of using fuzzy logic to locate clusters, but most of the similar problems only deal with 2D data.
Any form of segmentation of the point cloud would be great, as the final idea is to distinguish targets even if they are of similar color.
Thanks
 program.robo program.robo
|
|
|
|
Anonymous |
18 year
|
Cameron,
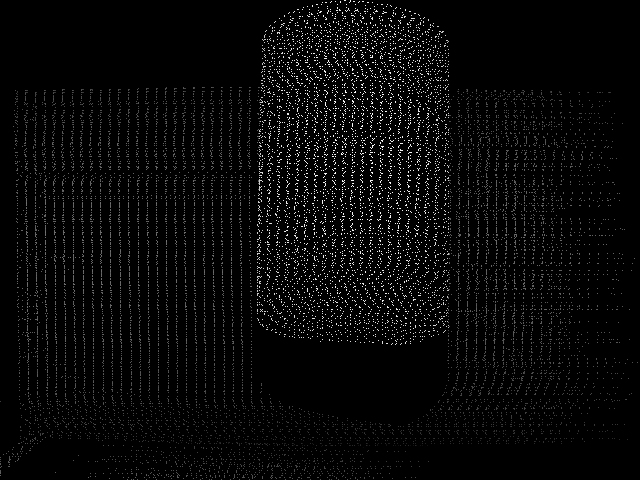
Ok, we got an image from that point file. The first is just a literal point image to see what we're working with .. which show objects quite nicely.

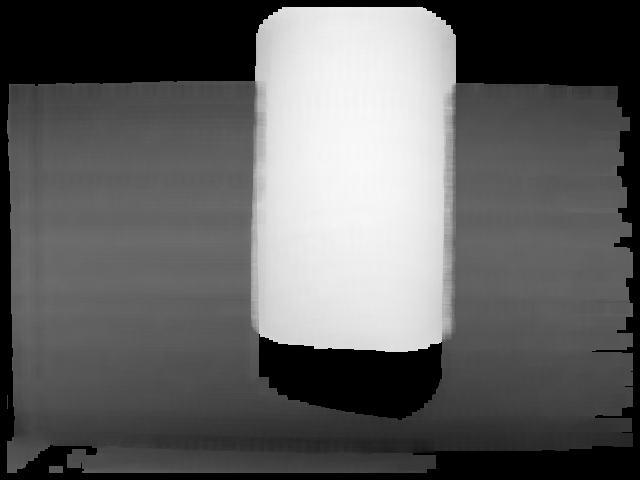
The second is a mean filter on non-zero pixels that helps to fill the empty spaces between the points without causing too much bleeding of the image edges. (more research can be done here ... but many standard techniques exist).

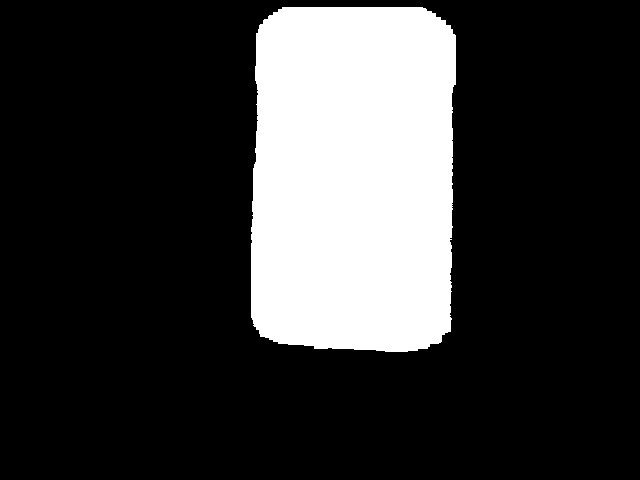
and the final image is what image2 looks like just using the auto-threshold routine to segment the object from the background.

Is this the kind of thing that you are interested in? We wanted to confirm with you that our thinking is along the lines of what you are thinking. Note that once the image is in the pixel domain many of the RR functions that act like cloud analysis such as the thresholding or flood filling routines should work quite nicely.
STeven.
|
|
|
|
from Australia [87 posts] |
18 year
|
Hi STeven,
It sounds like you've got done exactly what I was asking about. I would like to be able to identify separate 3D objects, e.g. like blobs in 3D... The removal of background, you did, is awesome.
So, you say that there are a number of RR modules that can cope with 3D data?
I can get you some more scans with multiple objects if you want to further check you program.
Cheers
|
|
|
|
Anonymous |
18 year
|
When do you guys plan on releasing the module to deal with point clouds? I'm very excited about that ability.
Regards,
Nemanya
|
|
 |
John Christian from Norway [25 posts] |
18 year
|
Thats very nice point data you have there from a home made laser project. Might I ask how much time it uses to "scan" a scene? If you could align the point data with a picture so that each point gets a color as well there are tons of things you could do with RoboRealm to separate objects. Naturally point data alone isnt always enough, since e.g. an object the floor would have many Z values that are the same as the floor. Some sort of filtering would be needed to remove these "lines" coming out of the object.
A laser scanner would definitely help out identifying objects that blend into the background or other objects simply because they got similar colors, which is often the main challenge for blob separation and detecting. I wish there was a "web-camera" with this built in... although blasting a laser all around the room is probably not very friendly for the eyes. :)
|
|
|
|
Roumen Popov from United Kingdom [2 posts] |
18 year
|
Hi cameron, that's indeed a very nice point cloud you are getting! I guess the next question is how fast the scanner is?
I've experimented a bit with 2D laser scanning myself, but found it too slow. See my web page http://www.vision-navigation-robot.co.uk/VNR_1L_detailed_specification.htm
If it's not a secret, would you share the principle of the scanning you are using? Since you are getting a point cloud rather than lines I can deduce it's not webcam-triangulation based or it will be awfully slow. The remaining option is that you've home-built a true time-of-flight laser range-finder, which, well, is hard for me to believe even in these days of cheap high-performance electronics, so I am really intrigued.
Best of luck with your project!
|
|
|
|
Anonymous |
18 year
|
|
|