Action after detection of Bullseye Sunny Nanade from India
3 year
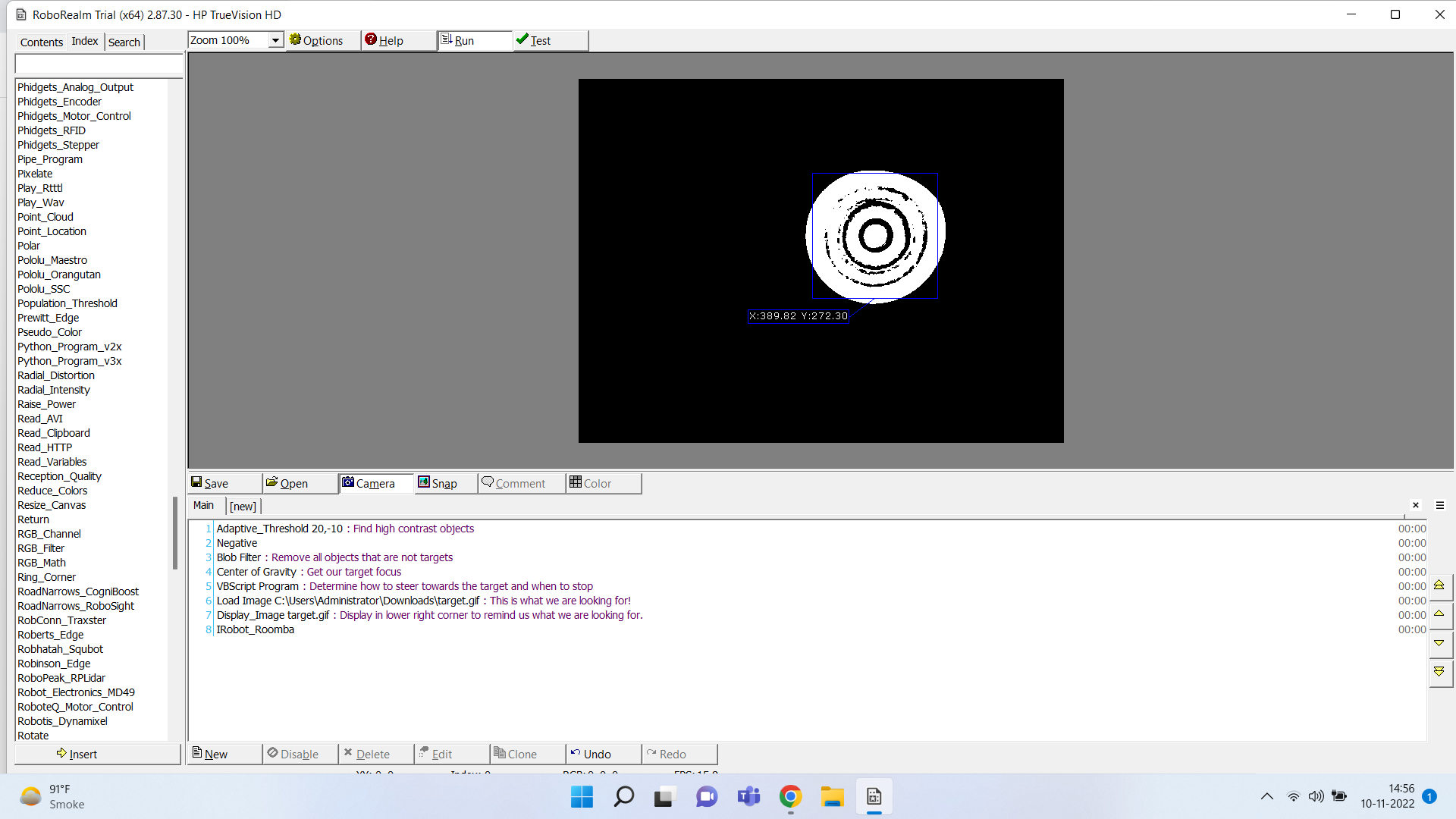
I am running a drone with USB camera on RasPi 4B, I am able to detect the Bullseye using your file.
Now after the Bullseye has been detected, how do I signal the drone?
I am using Mission Planner for the Autonomous navigation of the drone, Quadcopter.
How to get any kind of signal as an output from Roborealm after bullseye detection?
Kindly guide.
If you have any questions/issues about RoboRealm or image processing this is your chance to ask a question.
Your question and any responses will be posted to the forum section of the website for others to read and learn from.
Note that any submission will be considered property of RoboRealm. If you do not wish your images to be
displayed as part of the RoboRealm site please do not submit those images.
Any submission may be removed from the website at the discretion of RoboRealm personnel.