|
fire fighting robot
tawsif from Mauritius [7 posts] |
19 year
|
dear steven,
I am implementing a camera on my fire fighting robot
I wish to communicate with my robot via a remote PC. I am using the serial port for this task and connect a MAX 232A with the transmitter chip TWS 434 to it.
I would like to send a single ASCII character when the required frame has been processed. How do I go about using the serial port module of Roborealm. I haven't been able to understand this quite well from the documentations.
Please give me some details about the transmitted word, i.e. nos of start bits and stop bits.
I would like to thank u and all those who contributed in the design and implementation of this Roborealm software. You are doing a fantastic job buddy!
looking forward for your suggestions

|
|
|
|
Anonymous |
19 year
|
tawsif,
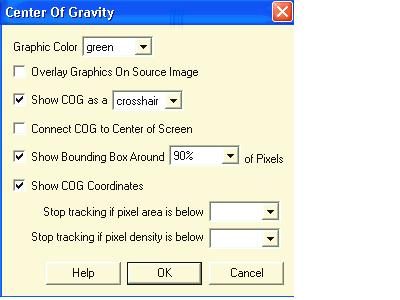
based on the included image we assume you are using the COG to detect the flame object. This would be reflected in the COG_BOX_SIZE ... if this variable is set and has a value > 10 (not sure if this amount is high enough for you) then the object will be detected.
So you can either send the COG_BOX_SIZE over your serial connection and have the receiver determine what to do with it OR you can use a conditional to just send a single pulse to your hardware over serial to indicate something is seen. Since the pulse will make your hardware code easier we've included an example of that below.
Have a look at the module .. they are quite simple. Note that the serial module can be configured to send different stop bits, baud etc. You should change it to the right baud and com port. Notice the single text ascii "1" being transmitted over serial (send sequence). If you would like to transmit a value for each of the frames being processed you could remove that "1" and replace it with \[cog_box_size] which would transmit a single byte that represents the box size.
I'll pass your thanks onto the team!
STeven.
 program.robo program.robo
|
|
|
|
fire fighting robot
tawsif from Mauritius [7 posts] |
19 year
|
Dear Steven
I am trying to use the serial port just the way you advised me
it works fine but I've got some problem buddy
I am now sending a hexadecimal code via the serial port, and from RR documentations, the format is
/x0f , for example
but the thing is that I am observing the signal from a CRO and when I change the byte to
/x0a,
I don't observe a change in the transmitted signal
when I program my PIC 16F877A to check for the 0f byte in hexadecimal and preliminary light a led if (0f in Hex) is received, I see no response from my microcontroller
I wonder whether the format that I am sending the data to the serial port using the serial port module of RR is correct.
Please check out this format and let me know.
Remember that the RS232 data that I am sending goes through a Max232A which is a RS232/TTL converter.
I am trying to establish an RF communication between the PC and the robot.
My point of interest is that I want to send a hexadecimal code word to my robot via RF communication so that the robot knows that the target has been identified from the CMOS camera.
|
|
|
|
Anonymous |
19 year
|
I'm not sure if this is a typo or not but your slash is the wrong way in your example. Try using
\x0a
instead of /0xa ... can you verify this?
Perhaps you can include your robo-file for us to have a look at.
Thanks,
STeven.
|
|