|
How to use minoru?
ashira from France [8 posts] |
10 year
|
Hello STeven,
I try to use a depth or disparity map from minoru 3d camera with the stereo module.
But I don't know how to use this module. "two separate images" : Only one of cameras works, and "single side by side image" : The cameras work but it doesn't produce a depth/disparity map.
Can You explain me how to use this module please ?
Thanks for your help!
|
|
|
|
Carl from Your Country [1447 posts] |
10 year
|
Ashira,
As I just mentioned in
http://www.roborealm.com/forum/index.php?thread_id=5590#
the minoru is NOT a great stereo solution. Its really meant for human consumption of anaglyph images which has a lot more room for error. Its amazing how our human visual system (HSV) can adapt to really misaligned images.
Regardless, you should be able to use the Two Separate Images selection and select each webcam. The Minoru *should* appear as two separate webcams which can be selected in that dropdown.
Getting a good image is time consuming. I'd start with a simple scene and play around with the window size to see if you can get a good result.
Alternatively, use the Mosaic module to create a single image of left and right pictures, save that and post it here so that we can help you figure out the right Stereo parameters. Keep in mind that it will *not* be a great result! We've had better success with higher quality webcams and just mounting them close to each other in a secured fashion.
STeven.
|
|
|
|
ashira from France [8 posts] |
10 year
|
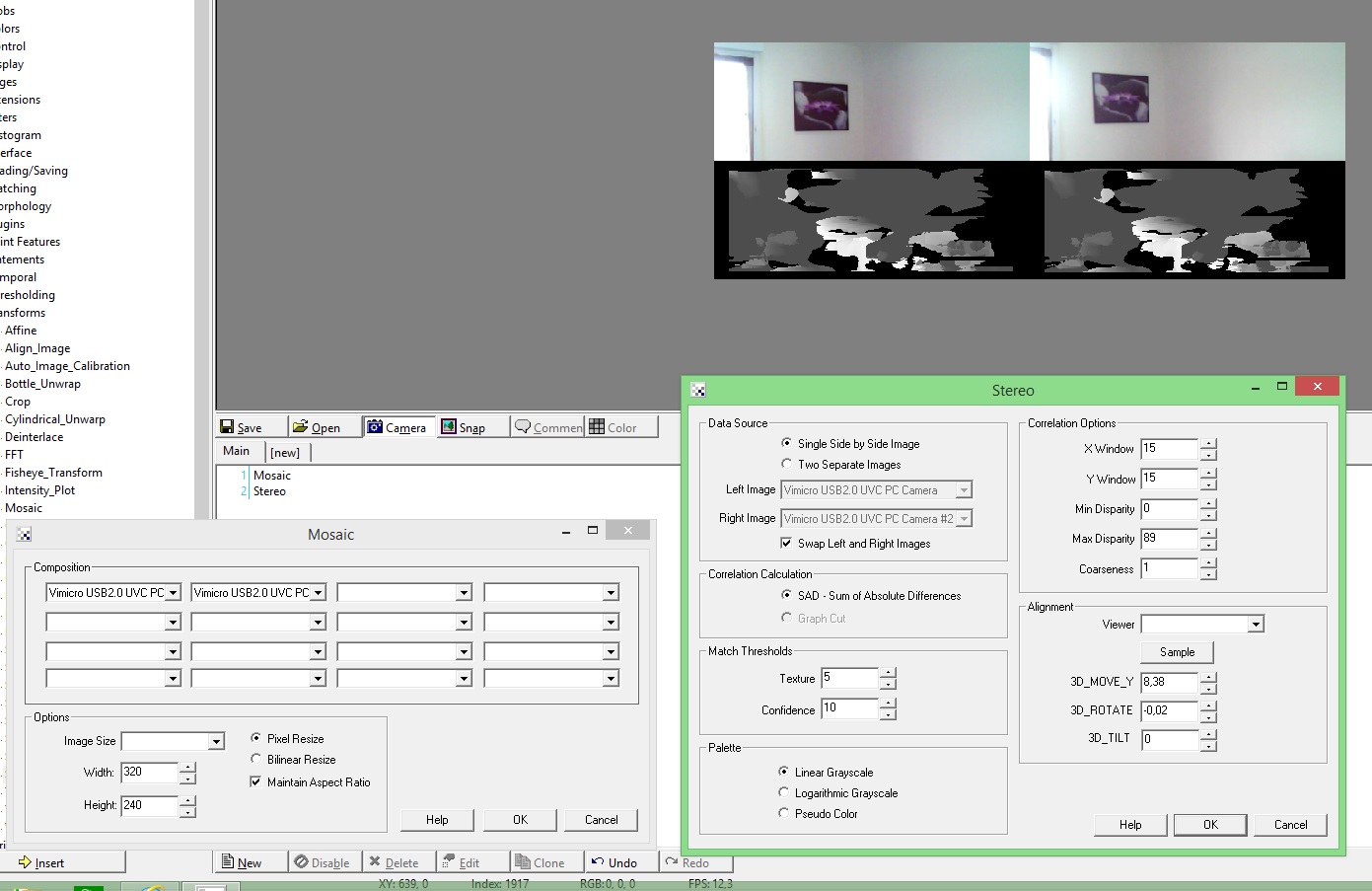
Hello STeven,
So, there are 2 webcam which can be selected. I upload a setup screenshot.
I bought this cam for tests. I think I'll buy an other camera.
Thanks for advice.

|
|
|
|
Carl from Your Country [1447 posts] |
10 year
|
Ashira,
Can you upload just the two raw unmodified images? We don't need the GUI ... just the actual images.
Also, I'd recommend starting with an image that has a lot more texture. Blank white walls are not ideal for stereo matching. See if you can capture an image outside where the road/brick walls offer a lot more texture. That helps with calibration. See attached image.

|
|
|
|
ashira from France [8 posts] |
10 year
|
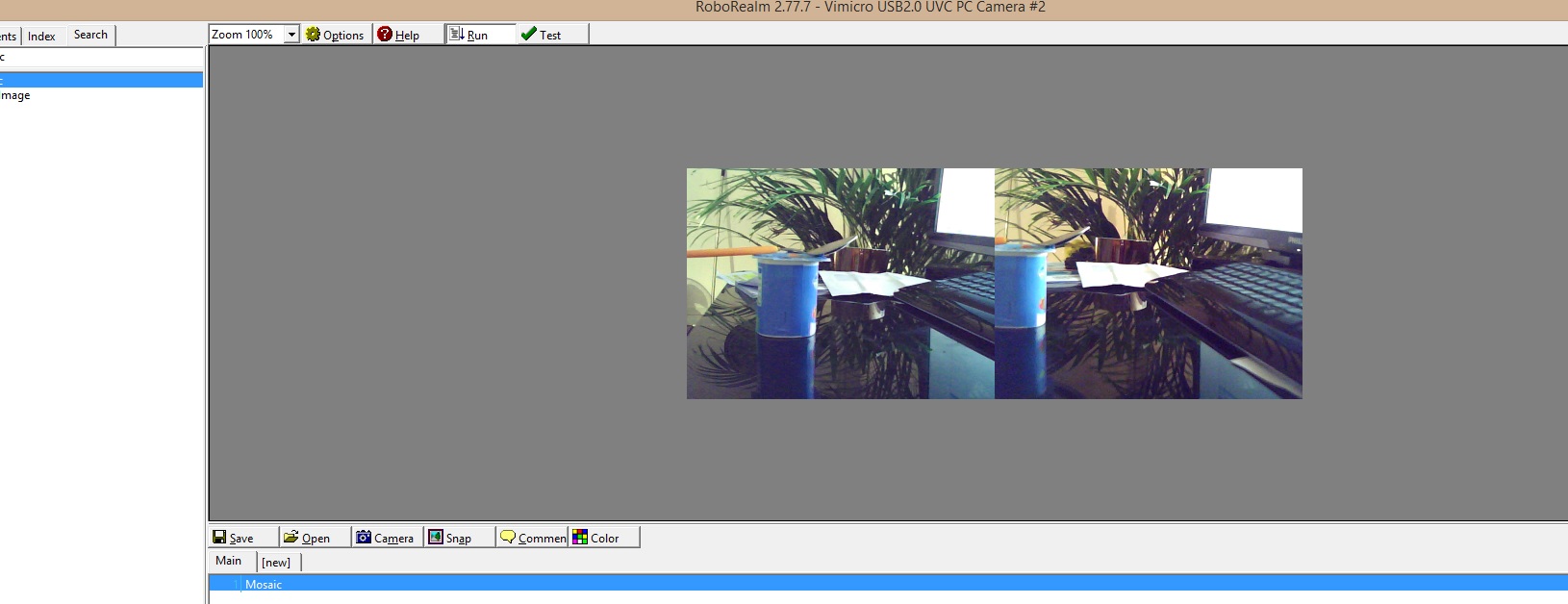
Hello STeven,
this is the unmodified images from moazic module. Does the textures are enough ? (sorry foir my late)

|
|
|
|
Carl from Your Country [1447 posts] |
10 year
|
Can you press the Save button and type in something.jpg and post that image here? I need the raw images and its very important to get the exact data that the camera is sending. Cropping from an interface screenshot isn't the best way to do that.
Thanks,
STeven.
|
|
|
|
ashira from France [8 posts] |
10 year
|
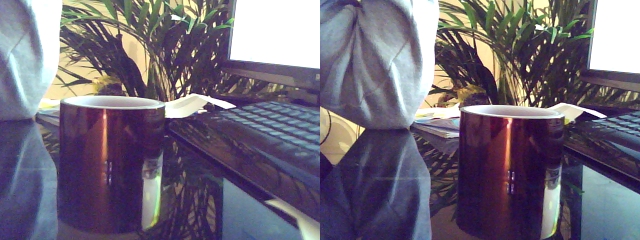
Ok, so I saved and used the snap fonction for this picture.

|
|
|
|
Carl from Your Country [1447 posts] |
10 year
|
Ashira,
Unfortunately that doesn't look like it is working. I can't tell if it is the reflections that is confusing it or there is warping going on with the camera. Can you instead take a picture of a flat textured surface like an outside building wall? Its easier to calibrate on that rather than a full depth scene.
I've attached the configuration that works somewhat with the Minoru we have. I doubt this will work with yours but its a good reference.
STeven.
 program.robo program.robo
|
|
|
|
ashira from France [8 posts] |
10 year
|
|
Your configuration works a little bit with me, I'll take an outdoor picture. What did you think about the creative senz3d and this 3d system ? It's better than stereo vision ?
|
|
|
|
Carl from Your Country [1447 posts] |
10 year
|
senz3d would be better than stereo. Most projective systems are better than stereo which will suffer from lack of texture. Keep in mind these projective systems will not work very well or at all outside since they typically use IR as the pattern wavelength.
For indoor use, senz3d, kinect,etc. will almost always be better than stereo. Outdoors, either stereo or (if you can afford it) lidar would be the way to go.
STeven.
|
|
|
|
ashira from France [8 posts] |
10 year
|
|
|
|
|
Carl from Your Country [1447 posts] |
10 year
|
Very nice! That's much more precise that what I thought you could get using that system. Well done!
STeven.
|
|