STeven,
It was great talking with you at the MiniMaker Fair yesterday! Here are some sample images you asked for. As a refresher, I had asked about using Roborealm to read an analog meter on a type of instrument I need to calibrate. How I envision the procedure is as follows: First I would set up a web cam in front of the meter, then I would apply my resistors to be measured so that I get a zero reading and a full scale reading. I've not explored how to interface Roborealm with LabVIEW but ultimately a LabVIEW program will be automating the procedure. After I get meter angles for 'zero' and 'full scale' I will then apply different resistances and then I would like RoboRealm to return the angle of the needle on the meter. It can be in pretty much whatever units are easy.
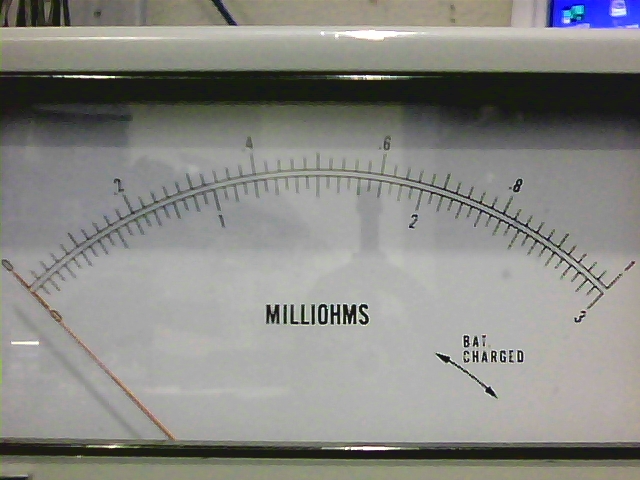
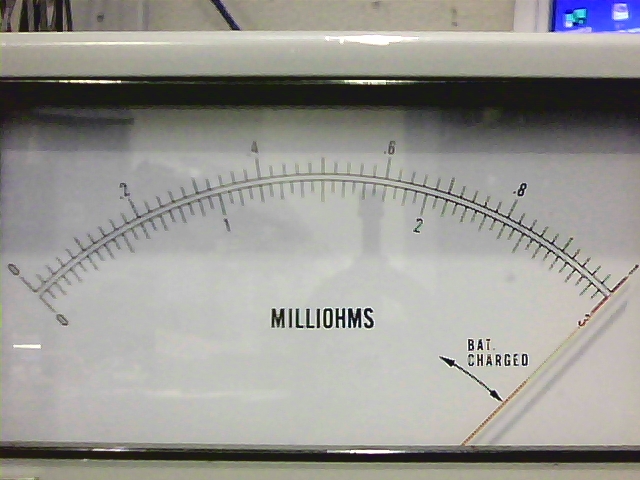
I'm wondering what would be a good approach? maybe if the camera taking the images is fixed enough, would a good approach be to subtract the 'zero' image from the current 'reading' image to see what has changed? Or look for the red needle on the black and white background?
Attached are 4 images. They all start with today's date (20100718) then a space, then a number proportional to the needle reading (0, 40, 60 and 100). Unfortunately, the (cheap) web cam moved between images, but for the final setup I'll have it more rigidly mounted. Another thing I learned; it is very likely I'll need a much better web cam! I couldn't consistently get it to provide 640x480 resolution (the option wasn't there in the pull down box).
Thank you for your time,
- Steven Ciciora
   
|
|