|
Automated Rifle target Scoring
TimC from Australia [4 posts] |
17 year
|
Hi Everyone,
I was hoping I could get some ideas thrown around for a project I am working on for a local high powered rifle club I am a member of. Basically we have roughly 1m x 1m targets with 10 rings. When a person shoots at the target we pull it down, patch and mark the shot with a marker. I want to make the process faster and easier by automating the process. Now we can get electronic targets here which use sound to determine the point of impact using 4 microphones. But they are VERY expensive.
I want to use a camera to do all the work. Can I use RoboRealm to compare 2 images, one before and one after a hit and work out where the new hole appears... to within a few milimetres?
So...
1. Can it be done?
2. Has someone already done it?
3. Can anybody help me out...?
Any help at all would be greatly appreciated...
Regards,
TIM
|
|
|
|
Anonymous |
17 year
|
TIM,
Yes, that does sound possible to some extent. Getting it to milli accuracy will probably require a high resolution cameraor a good macro lens. But to get things started try taking those two pictures from the setup that you describe ... this will give a lot more information about the setup and if this is possible to do.
Note that if the hole in the marker is tough to see you might try putting a darker lighter background behind the target with the hope that the background will show up better on a new hole. Not sure if this is really needed ... the images will help to know if any modifications are needed.
STeven.
|
|
|
|
TimC from Australia [4 posts] |
17 year
|
Hi Steven,
Been raining here so haven't managed to get up to the range. I have bought a 2W 2.4GHZ wireless transmitter/receiver. If I can't transmit the video 300, 400, 600 YD then I am kinda stuck.
I have been trying to work out whether to mount the camera to the target using an arm so that any movement in the target does not affect the picture. Although if I can bring the time between the before and after shot to less than a second I might not need to.
I am toying with the idea of using a powerful infra red spot light to provide a constant light source. I will just have a play and get some pictures with and without, and at different contrast ratios.
I have also built (not that complicated really) two 'vibration' sensors for the target and the rifle. Which are just the disks out of a couple of piezoelectric buzzers. First one picks up the vibration of the fired gun, computer takes a snapshot. Target gets a hit, computer takes another picture. Computer compares the two pictures and finds, highlights and records the location of the hit. That is the plan...
I'll keep my progress posted.
|
|
|
|
Anonymous |
17 year
|
Tim,
Sounds like you've put a lot of thought into this. Seems like you're on the right track. While ideally you would just have two images to work with it may also be possible just to keep filming the target and process images as they are streamed from the camera. This would provide a before and after image as the computer and keep track of current-10 frames to do the comparison ... but we'll see if that is needed or not. Just something else to keep in mind if the vibration sensors don't pan out!
My fingers are crossed for a sunny day!
STeven.
|
|
|
|
TimC from Australia [4 posts] |
17 year
|
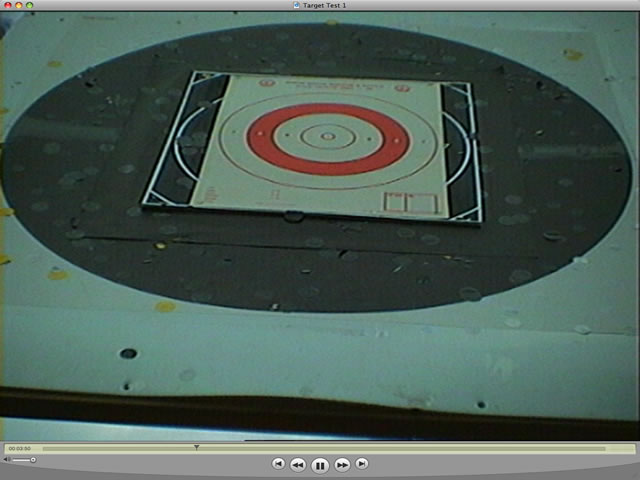
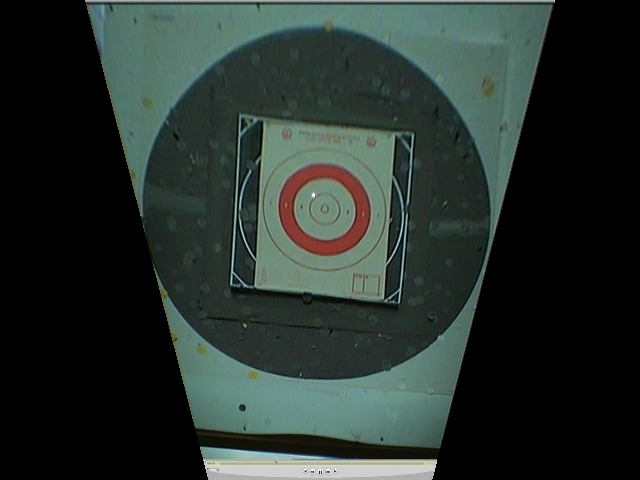
Ok, just come back from the range. I setup a camera on one of the targets. See Picture.
A few things so far....
1. I have a feeling that the angle of the camera is too great. Fixing the camera to the target on an arm would raise the camera and reduce the angle. Unless I can fix it using a lens.
2. The camera is not high enough resolution for a standard black/white target. But using a light coloured card target in place of the usual centre makes seeing the hits easier.
3. The vibration sensor works like a charm, however I have to somehow reduce the sensitivity as it was picking up the cracks of bullets from other lanes.
4. Wind does move the target, however fixing the camera to the target might solve this. Unless the software can handle it.
I have attached a picture of the setup, target before hit, after and a digital camera (5MP) picture. I have a video but I recorded it uncompressed so it is 12 GB... lol.




Any more test suggestions...?
|
|
|
|
Anonymous |
17 year
|
Tim,
Looks great!
Attached is a robofile that loads in the before and after images as you provided and identifies the new bullet hole is.
A lot of the modules are used to get rid of anything but the large black center circle to ensure better stability.
The bullet hole is detected quite nicely. The next steps are:
1. We need to get a better calibration of the transform that the camera undergoes as will improve precision in locating where the bullet hole is.
Can you print out the attached grid image, place it on the target and then take a photo again using the camera. The pattern helps to align the image correctly so that even when you image the target from a non-perpendicular angle the software can compensate for this. You can see the last module in the pipeline is a rough attempt at this.

2. Now that the bullet hole has been identified we would need to know what coordinates do you need to identify where this hole is. We can easily get the X,Y coordinates of the hole in the image but this will probably not help localize it with regards to the target. For example, if the bullet hole location is provide as an angle and a distance from center (i.e. polar coordinates) this would provide the location of the bullet hole with respect to the center target. This information can then be used to replicate where the hole is in another system without needing to know the image dimensions. How is this information getting into this other system or display.
Is this the intended result of this imaging process?
3. Next is to determine how to trigger this analysis process. The vibration sensors will trigger an image capture ... but where and how does this image get fed into a computer and ultimately loaded into RR. Is this a webcam that is getting triggered ... or a different kind of camera? Perhaps you could explain the type of camera you are using and if any PC connection exists to that camera.
... and I'm sure there are a couple more points but this should do for now.
STeven.

 target.zip target.zip
|
|
|
|
TimC from Australia [4 posts] |
17 year
|
Hi,
I am currently using a SONY Day/Night CCD camera. Only because that is what I had available. It is being captured via a USB 'DVD maker 2' capture card made by KWORLD. Again, what I had available. This setup would allow me to use a composite video transmitter to send the video signal from the target to the computer at the shooters position. I want the computer at the shooters end so they can enter their name and caliber so we can record the results if possible.
HOWEVER if a really high resolution camera IS required It would be better to do the processing at the target end and transmit the result page to the shooter to minimize video degradation. However, shooter input/output would be lost. Eg. Names, calibres, zoom in/out etc. I am limited to about 720x480 resolution...
Ideally if I could get the shooters to see a 2D Drawing of the target and the hits with a score table down the side I would be a very happy man. So polarized coordinates would be fantastic.
Especially since the 'centre' of the target gets changed for different ranges. Eg. Smaller bulls-eye @ 100YD compared to 600YD.
If the centre of the target was a particular colour can the software automatically find the exact centre of the target?
I was using a Macbook pro to do the testing but I intend on using a cut down WinXP install on PC. Unfortunately we have NO power to the range so everything will have to run off batteries. I am also toying with the idea of using a nanoITX based miniature PC to run each lane. But I am just concerned with getting everything working for now.
I have also compressed and uploaded the video I took. Notice the sounds of the other bullets and the bullets actually hitting my target when the hole appear.
http://www.youtube.com/watch?v=ZsEoHyp2LsE
I will print out the checkerboard pattern and take another image (does it matter what size it is?). I am going to mount the camera on an arm this time. I will have to make it his week.
Regards,
TIM
|
|
|
|
Jaakko Hyvätti from Finland [1 posts] |
14 year
|
|
Hi Tim, have you got any further with this? I'm thinking about indoors range system. Wind is not a problem then.
|
|