|
SRV- 1B
Ramya from United States [1 posts] |
17 year
|
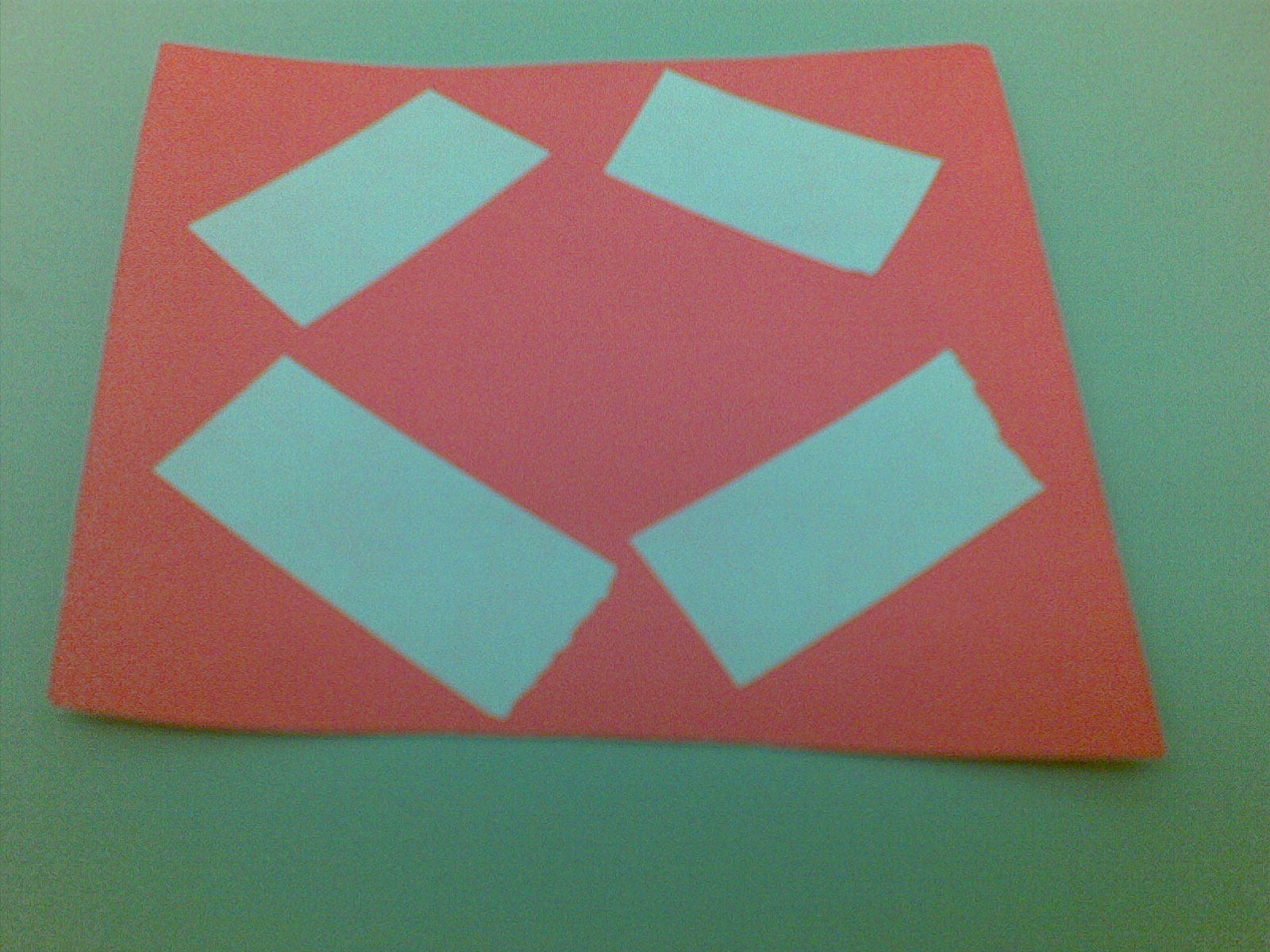
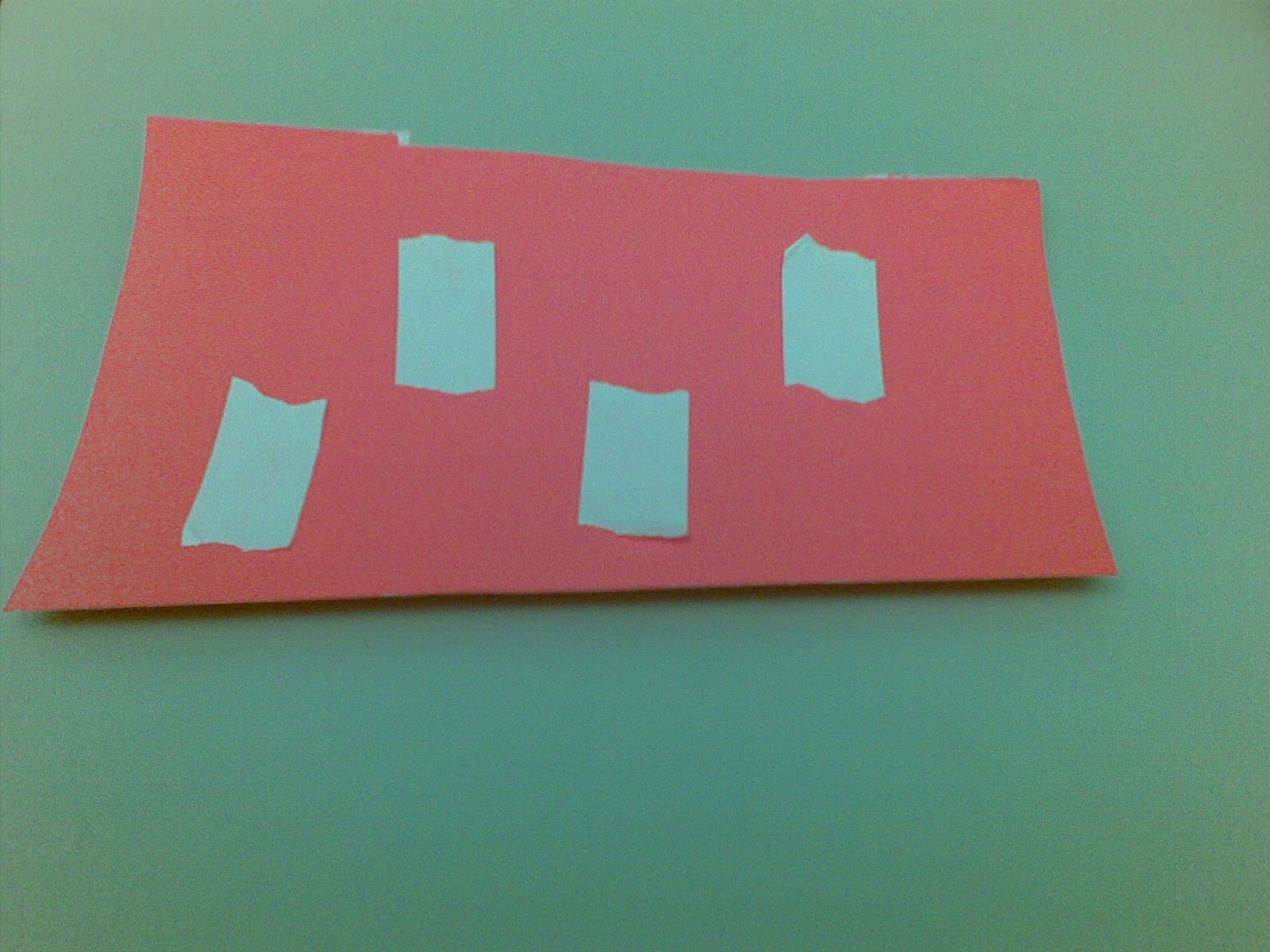
Hi. I am using the SRV - 1B for my project and I need to detection of visual markers. The deal with the visual markers is each one is different(unique). I am trying to recognize a visual marker (which is different from a tape laid on the ground). The SRV needs to have a logic in it which would make it recognize a marker, when it comes to one. The SRV has to stop at the visual marker and depending on the uniqueness of the marker, it has to turn. I am currently the functions similar to line following and shape matching in the tutorial. But the recognition does not occur. The various unique markers that I am using is shown as below. Could you please help me out on this?



|
|
|
|
Anonymous |
17 year
|
Ramya,
First off I'd use smaller images as you will find that processing will be quicker and you don't need that much information for your task.
Second, to keep things easy you can use two attributes to identify these objects. 1. Use the RGB_Filter to filter for red. 2. Then use the Geometry module to determine the object Compactness measure which are 210 265 and 90 which should be enough to distinguish the objects.
Have a look at the attached robofile.
If not can you post more images as they would be encountered? Also you might have a look at the moment statistics which may also be used to create stats about an object that are repeatable for new images.
STeven.
 program.robo program.robo
|
|