|
Bug in Path Planning "plan orientation variable"
Pranav from United States [4 posts] |
18 year
|
First of all, the Path Planning is a wonderful module. Unfortunately, there is a bug in it.
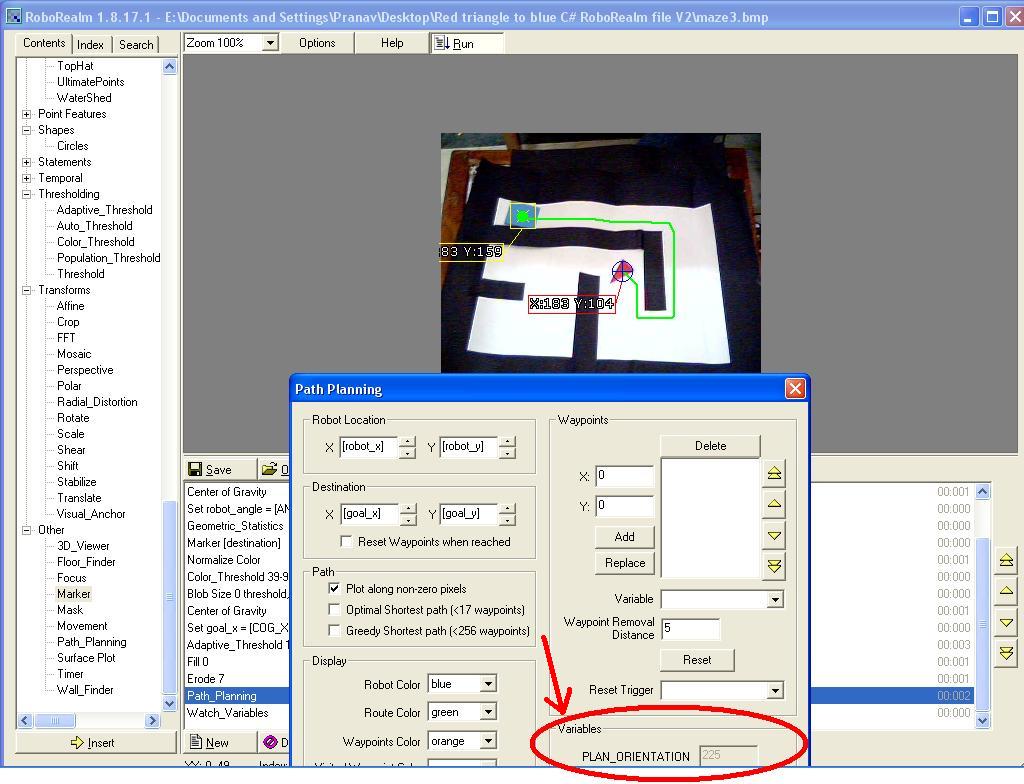
The "Plan Orientation" variable generated by this module can be wrong some times. To cut the long story short please refer the following snapshots:-
Image1: Snapshot of the maze to be solved, using a "Red Triangle" as robot. This red robot has to reach a blue destination.
Image2: The path planned by the path planing module. While the path planned is CORRECT, the plan orientation is INCORRECT.
Attachment1: The RoboRealm showing the code.


 program.robo program.robo
|
|
|
|
Anonymous |
18 year
|
Pranav,
Thanks for the images and robofile. We have been able to replicate this issue. We will get back to you with a fix ASAP.
Thanks,
STeven.
|
|
|
|
Anonymous |
18 year
|
Pranav,
a fix for this error has been uploaded to the site. Please download version 1.8.18.14 for the fix.
Thanks very much for the images and the robofile, that really helped to track down the error quickly!
STeven.
|
|
|
|
Pranav from United States [4 posts] |
18 year
|
STeven,
Thanks for the Fix. I was really surprised that the problem was attented so quickly and a fix was immidiately posted. You are very efficient.
Thank you,
Pranav
|
|