|
Floor Finder
µC Vision [4 posts] |
17 year
|
Hello,
someone has experience with the floor finder module?
How can I evaluate the data?
For the variable overview will be nothing?
Ulli greetings
|
|
|
|
Anonymous |
17 year
|
Can you post an image that you are working with? What piece of data are you looking to extract from using the floor finder?
STeven.
|
|
|
|
µC Vision [4 posts] |
17 year
|
Hi Steven,
I only have the Floor Finder on the camera image.
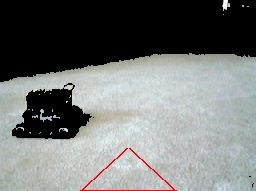
I have made the settings so that it looks like in the manual (see picture). But how can I judge what an obstacle and what is gone? How can I be variables for my program? With Gravity I did not come. Is there no example?
Ulli greetings

|
|
|
|
µC Vision [4 posts] |
17 year
|
|
|
|
|
Anonymous |
17 year
|
Ulli,
After the floor has been found one technique is to "collapse" the floor into drivable areas and then find the highest area that can be passed. This can be accomplished in a couple steps. First detect the floor

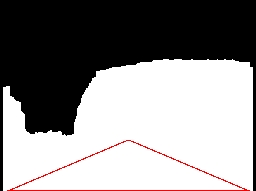
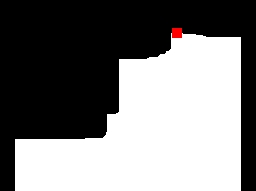
Next erode a little more and collapse the image. Collapsing will move all the "white" pixels to the bottom of the image such that the areas with the most "white" or passable areas will be higher in the image.

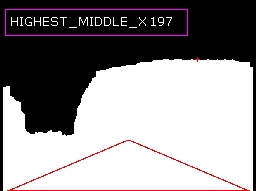
Now it is a simple matter of finding the highest point in the image .. accomplished by the Point Location module. At this point you could also horizontally erode the image to remove areas that the robot could not fit between ... but we'll leave that to you to experiment with.
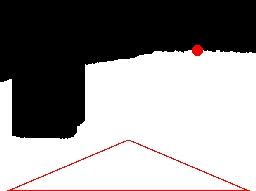
The final image shows the red X (it is a little hard to see) towards the right side of the image. You would then use that X location and compare it with the center of the screen to determine if the robot should move left or right. Using the VBScript module or your own application using the API you can then assign a left and right motor value as needed.

If you have further questions please include an image and robofile as that helps us understand what you are trying to do even if you cannot explain it in English.
Included is our robofile with embedded image that you can play with.
STeven.
 program.robo program.robo
|
|
|
|
µC Vision [4 posts] |
17 year
|
Hi Steven,
sincere thanks for your help!
Just something I wanted, you can vielicht into toturial.
I will now enable even a little experiment.
Beautiful week Ulli
|
|
|
|
Anonymous |
17 year
|
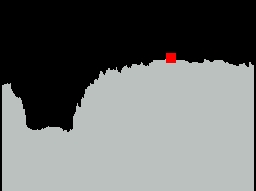
An additional slightly better way to do this is to use the fill from bottom to top routine. In this technique the obstacle stops the upward filling and causes the floor shape to be a lot more defined. In the collapse the part of the carpet beyond the robot contributes to the eventual shape whereas in the fill method it does not.

As you can see the final depression caused by the robot is much more pronounced using this technique.
STeven.
program.robo
|
|
|
|
Anonymous |
17 year
|
|
Many thanx Steve for support!
|
|
|
|
Anonymous |
17 year
|
If you don't like the idea of using the flood fill you can also use edges for the same function. Here's an image using Canny, SideFill, horizontal erosion (to remove the small impassible areas) and the point location module.

The results are similar to the flood fill but might be better in certain circumstances where the carpet light really changes. However, if the carpet has multiple colors this will fail whereas the floor finder will work ...
STeven.
program.robo
|
|
|
|
Anonymous |
17 year
|
Correction to the previous post, the first line was in reference to "floor finder". If you instead want to use "flood fill" you can use it to find the largest single blob in the image which in the case of a single color carpet *should* be the floor. The image you end up with after flood fill, blob filtering and collapsing is

Yet another tool in solving this problem.
STeven.
program.robo
|
|