|
Suggestions on Vision and Filtering
Sam from United States [1 posts] |
18 year
|
Hi,
My name is Sam Park and I'm with California State University Northridge's Intelligent Ground Vehicle Team. We are currently using RoboRealm to perform perspective and radial correction on our robot's camera. The result is then passed through the Virtual Camera driver to LabView for further processing and feature extraction. I was wondering if you could suggest any filters or combination thereof to help filtering.
The IGV (www.igcv.org) competition is an international competition sponsered by Department of Defense to build and program robots to autonomously navigate through obstacle courses and to move to a series of waypoints. The terrian is mostly flat green grass with painted white lines and construction barrels. The robot is to remain inside the white lines while moving through the course. In LabView we are doing simple filtering to extract the lines and knock out the grass.
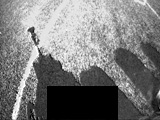
Below are some examples of what the robot's camera may see:
 
Ideal case
 
Worst case
Thanks,
Sam P.
|
|
|
|
Anonymous |
18 year
|
Sam,
Are you able to have the camera take an overexposed and underexposed image of the same scene? I.e. can you programatically control the shutter/iris settings of your camera? If this is the case then it might be possible to combine the 3images into a single corrected image. The glare and shadows in a single image are beyond and below the range of your camera and contain very little information. Having the under/over exposed image will help to fill in those dark/light areas. Note this will require your robot to move slowly or not at all during the imaging process ... or the use of more than one camera.
Let us know if this is possible or not.
STeven.
|
|