wi all, again :)
im still working on image processing and still love RR and now my teacher gave me a new task.
Tri to get coordinates for a IR ball, the one used in robocup, for a new soccer robot project.
I have modify a normal web cam to get only IR light, (remove the normal IR filter and put a filter of visible light)
So all works well and the image is perfect but i have one problem...
...Reflection.
So i made a program to tri to get the Coordinates of the ball avoiding the reflection, but ist not very good.
Any one want to help?
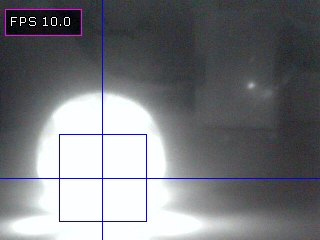
IR off

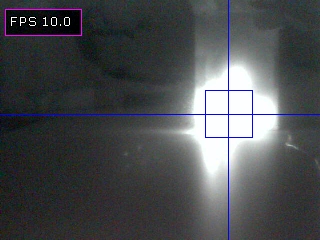
IR on

Ball close

far white reflex from the table

A box behind it (it could be a adversary robot or something so i need to fix this)

thx in advance
Ricardo Sampaio
 program.robo program.robo
|
|