|
How to track a person
Ringo from United States [18 posts] |
18 year
|
I would like to be able to have a robot track me and follow me around. If I were a Blue t-shirt and set it up to follow a big blue blob it works ok but what if someone else in a blue shirt shows up, or I walk near a blue wall, etc?
Is there a simple way to follow a red circle on a blue background (or any shape that is easy)? that way I could get a special shirt made just for this reason. Ultimately I'd like it to find me by some other way but this seems like a good way to start. would something else be easier, stripes ot a shirt that is red on top and blue on the bottom?
Thanks
Ringo
|
|
|
|
Anonymous |
18 year
|
Ringo,
Possibly all of the above ... i.e. any large color blobs that are unique enough should be sufficient. The Blob Filter module can be used to detect blobs that are "near" or "touching" each other ... or in the case of a red circle in a blue shirt if a blob is "within" another blob.
The real question is what happens in practice? I.e. when a shirt is worn by a person the shape will be a little crumpled so detecting just shapes will probably not work. Detecting color should. But if a red blob inside a blue one is the combo what happens when someone turns to the side?
I think a horizontal striped blue, red, green shirt would probably be best. You would then configure the blob filter module to select each of the colors and include only those that are very near to each other. See example robofile below as to how to do that.
As we've not actually done this some experimentation will be needed .. but it sounds like a fun project!
STeven.
 program.robo program.robo
|
|
|
|
Ringo from United States [18 posts] |
18 year
|
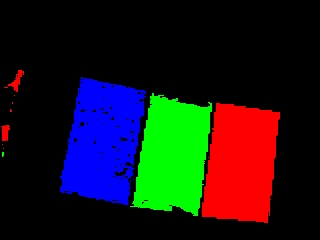
Take a look at the attached pics. I created a picture in paint. It is red,green. and blue blocks all touching each other.
The RGB filter picks them out, but the Blob filter shows nothing. I'm using the exact robo file you posted on this thread. Any ideas what needs tweaking?
Thanks
Ringo



|
|
|
|
Anonymous |
18 year
|
Ringo,
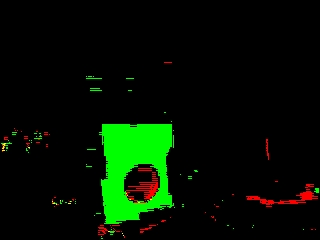
Actually the robofile is working perfectly ... the problem is that the script was written to detect blue,red,green bars NOT blue, green, red bars! I've attached the script with the order changed and it nicely identifies the middle green bar. That's what you'd use for detection ... i.e the middle bar.
Give it a try and let me know how it goes.
STeven.
program.robo
|
|
|
|
Ringo from United States [18 posts] |
18 year
|
OK, I think I get it now. So you have the first blob to track then the 2 nearest. I was assuming it was like object 1 then next to it is 2 then next to it is 3, but it is more like 1 then 2 must touch 1 and 3 must touch 1.
Pretty cool, Now to find myself a colorful shirt :-)
Ringo
|
|
|
|
Anonymous |
18 year
|
Yup, you got it. Let us know when you get that colorful shirt! :-)
STeven.
|
|
|
|
Ringo from United States [18 posts] |
18 year
|
Steve, I just downloaded the latest version of Roborealm, and now my colored shirt tracker no longer works. Even if I use the robo file you sent me in this thread. When I look at teh blob filter it looks screwed up.
The main tab has
unknown
unknown
unknown
object 1 tab has
Above Object 500
Unknown
Closest RGB #0000FF
Unknown
Unknown
Unknown
Unknown
Unknown
Unknown
Unknown
and the rest of the tabs are blank. I don't have my old version anymore and I don't remeber how to set up this filter. I attached the .robo file for you to look at.
Thansk
Ringo
|
|
|
|
Anonymous |
18 year
|
Ringo,
We had accidentally introduced a problem with loading old configurations of the blob filter. We've made that fix and uploaded ver 1.7.20.1 which contains the fix.
The previous robofiles should now work again.
STeven.
|
|
 |
Orac from United Kingdom [6 posts] |
18 year
|
Hi,
This robo file causes Roborealm to crash for me, can anyone sugest how to fix it for the latest version.
Thanks
|
|
|
|
Anonymous |
18 year
|
Here's an updated file that doesn't cause RoboRealm to crash (that fix is also in the next release out tomorrow). The blob filter has undergone quite a bit of change since this was originally written.
STeven.
program.robo
|
|
|
|
Orac from United Kingdom [6 posts] |
18 year
|
Hi, thanks for the prompt reply.
Although it doesn't crash anymore, the green bar is displayed no matter what order the original bars are in.
Just trying to get my head around how the blob filter is working with the objects and the nearest command.
Thanks
|
|
|
|
Orac from United Kingdom [6 posts] |
18 year
|
Hi,
Still couldn't get the "nearest" function to point to an object. It always blanks off the selsction box or both radio buttons come on at the same time, so I have tried a different method for now.
I am tracking a red blob inside a green blob which is working quite well.
Normalise
RGB Filter, Red, Green
Blob size max 1 object
Blob filter using the around function
Cog
Its working quite well, but flickers a lot which I think is due to the camera not processing red colours very well. Also a fair bit of what looks like interferrence lines running through the blobs.
When it comes to driving the motors, I think I will average the cog variables out over a second or so to eliminate these split second flickers.
Might be time to invest in a good camera. Anyone have any recommendations for a cheap USB camera that works well with RR and shows up the colours correctly?
Thanks




|
|
|
|
Anonymous |
18 year
|
Orac,
Looks like you have an interlacing issue. Try using the Average filter to average a bunch of images before processing. That will improve the image quality and get the color detection to be more reliable.
In terms of camera, most of the USB cameras around $50 are quite good with reasonable image quality.
I think we got the nearest blob filter issue. The GUI selections were not getting updated properly. Download the latest ver 1.8.14.0 to get that fix.
STeven.
|
|