Hi Steven,
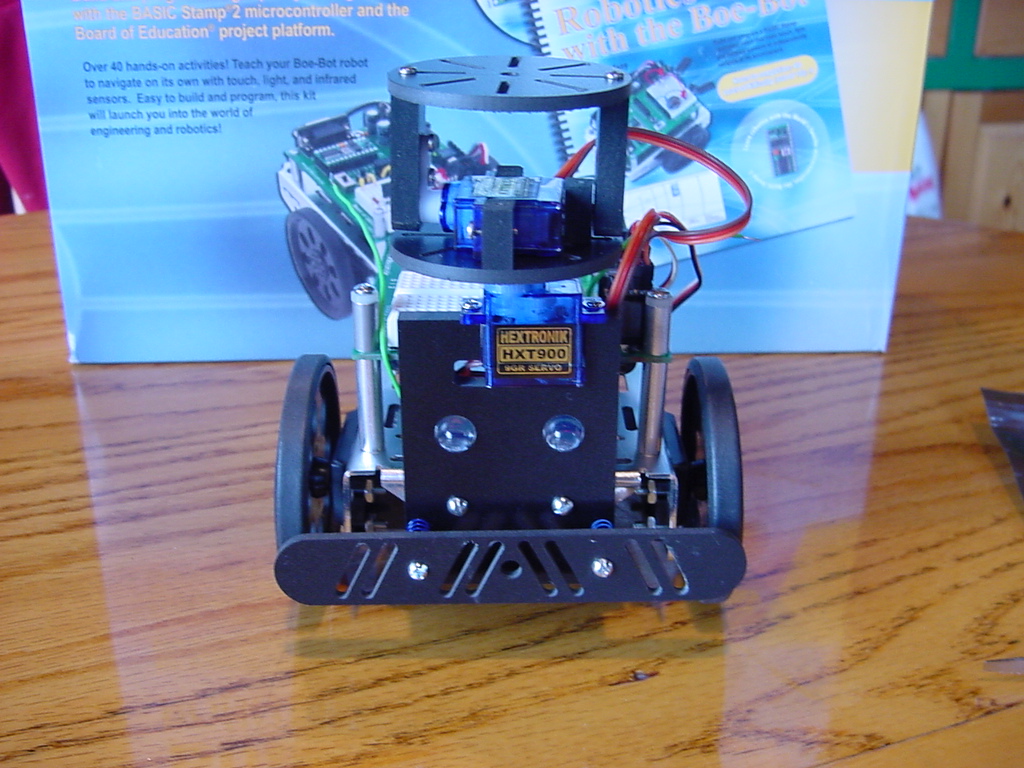
Here is some code that does what I want on the boe bot side. It was written for the bs2 and the eb500 bluetooth adapter.The person who wrote it ( Stuart Weightman ) used StampPlot V3 on the PC side. If we could use Roborealm on the PC side it would be the most fantastic Boe Bot software ever. Hope this helps. Also there is a manual for the eb500 here http://www.parallax.com/dl/docs/prod/comm/eb500UserManual.pdf
'{$STAMP BS2} Bluetooth GUI control of tracked vehicle Stuart Weightman 2005
' **** StampPlot control/interface with Bluetooth EB500 and Basic Stamp2****
' **** Pins 10 through to 19 are available for I/O, sounder on P11, SSC on P10 ****
INPUT 5 'EB500 I/O Line 5 provides the connection status
PAUSE 1000 'Wait for the eb500 radio to be ready
WaitForConnection:
SEROUT 10,$4054,[255,0,127] 'Set Left servo0 to stop, mid position
SEROUT 10,$4054,[255,2,127] 'Set Right servo1 to stop, mid position
IF IN5 = 0 THEN WaitForConnection
GOSUB Beep1 'Beep when connected and continue
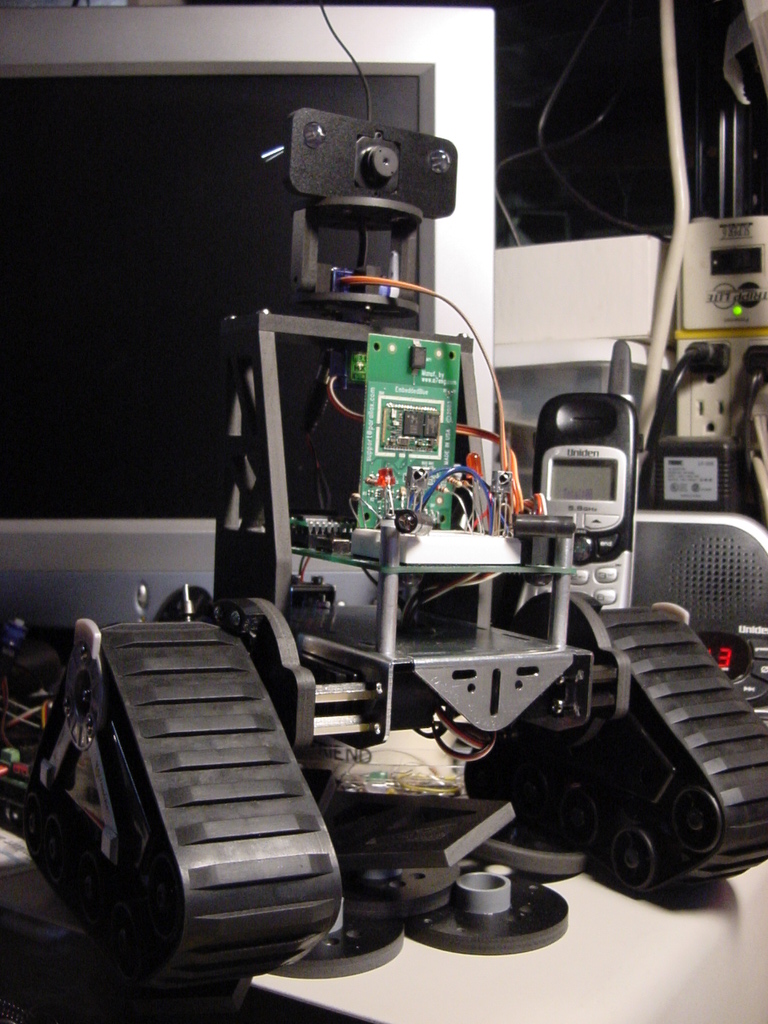
Eb500
Bluetooth adapter
Parallax BOE
Basic stamp II
Serial
Servo
controller
Dual motor
speed
controller
M1
M2
PC,
StampPlot,
& Camera
display
Wireless
camera
Servo pan
Servo tilt
Bluetooth
adapter
PAN VAR Byte
TILT VAR Byte
EStop VAR Bit
FF VAR Bit
FS VAR Bit
BS VAR Bit
BF VAR Bit
FR VAR Bit
FL VAR Bit
BR VAR Bit
BL VAR Bit
SR VAR Bit
SL VAR Bit
L VAR Byte
R VAR Byte
XL VAR Byte
XR VAR Byte
Main:
IF IN5 = 0 THEN WaitForConnection 'If Bluetooth connection is lost then wait to re-establish
SEROUT 1,84,["!READ (PAN)",CR] 'Read StampPlot PAN slider
SERIN 0,84,1000,Main,[SDEC PAN] 'Accept returning data
SEROUT 10,$4054,[255,4,PAN] 'Scaled output to SSCI servo4 (needs baud $4054 not 84)
SEROUT 1,84,["!READ (TILT)",CR] 'Read StampPlot TILT slider
SERIN 0,84,1000,Main,[SDEC TILT] 'Accept returning data
SEROUT 10,$4054,[255,6,TILT] 'Scaled output to SSCI servo6 (needs baud $4054 not 84)
SEROUT 1,84,["!READ (EStop)",CR] 'Request status (1/0) of STOP checkbox
SERIN 0,84,1000,Main,[DEC EStop] 'Store returning data
IF EStop = 1 THEN EmgStop
SEROUT 1,84,["!READ (FF)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC FF] 'Store returning data
IF FF = 1 THEN Forwfast
SEROUT 1,84,["!READ (FS)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC FS] 'Store returning data
IF FS = 1 THEN ForwSlow
SEROUT 1,84,["!READ (BS)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC BS] 'Store returning data
IF BS = 1 THEN BackSlow
SEROUT 1,84,["!READ (BF)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC BF] 'Store returning data
IF BF = 1 THEN BackFast
SEROUT 1,84,["!READ (FR)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC FR] 'Store returning data
IF FR = 1 THEN ForwRight
SEROUT 1,84,["!READ (FL)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC FL] 'Store returning data
IF FL = 1 THEN ForwLeft
SEROUT 1,84,["!READ (BR)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC BR] 'Store returning data
IF BR = 1 THEN BackRight
SEROUT 1,84,["!READ (BL)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC BL] 'Store returning data
IF BL = 1 THEN BackLeft
SEROUT 1,84,["!READ (SR)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC SR] 'Store returning data
IF SR = 1 THEN SpinRight
SEROUT 1,84,["!READ (SL)",CR] 'Request status (1/0) of checkbox
SERIN 0,84,1000,Main,[DEC SL] 'Store returning data
IF SL = 1 THEN SpinLeft
GOTO Main
EmgStop:
SEROUT 10,$4054,[255,0,127] 'Set Left SSCI Motor0 to stop mid position
SEROUT 10,$4054,[255,2,127] 'Set Right SSCI Motor2 to stop mid position
PAUSE 100 'Pause to view check tick
SEROUT 1,84,["!O EStop=0",CR] 'Clear the check box
GOSUB ClearChecks : GOSUB Beep2 'Clear all checks and Two beeps to acknowledge Emg stop initiated
L=127 : R=127 'L & R variables to mid stop value
GOTO Main
ForwFast:
L=255 : R=255 : GOSUB ClearChecks : GOTO Tracks
ForwSlow:
L=190 : R=190 : GOSUB ClearChecks : GOTO Tracks
BackSlow:
L=64 : R=64 : GOSUB ClearChecks : GOTO Tracks
BackFast:
L=0 : R=0 : GOSUB ClearChecks : GOTO Tracks
ForwLeft:
XL=L : XR=R 'Store in use values of L & R
L=127 : R=255
SEROUT 1,84,["!O FL=0",CR] 'Clear the check box
GOSUB TrackTimer
L=XL : R=XR 'Restore in use values of L & R
GOTO Tracks
ForwRight:
XL=L : XR=R 'Store in use values of L & R
L=255 : R=127
SEROUT 1,84,["!O FR=0",CR] 'Clear the check box
GOSUB TrackTimer
L=XL : R=XR 'Restore in use values of L & R
GOTO Tracks
BackRight:
XL=L : XR=R 'Store in use values of L & R
L=0 : R=127
SEROUT 1,84,["!O BR=0",CR] 'Clear the check box
GOSUB TrackTimer
L=XL : R=XR 'Restore in use values of L & R
GOTO Tracks
BackLeft:
XL=L : XR=R 'Store in use values of L & R
L=127 : R=0
SEROUT 1,84,["!O BL=0",CR] 'Clear the check box
GOSUB TrackTimer
L=XL : R=XR 'Restore in use values of L & R
GOTO Tracks
SpinRight:
XL=L : XR=R 'Store in use values of L & R
L=255 : R=0
SEROUT 1,84,["!O SR=0",CR] 'Clear the check box
GOSUB TrackTimer
L=XL : R=XR 'Restore in use values of L & R
GOTO Tracks
SpinLeft:
XL=L : XR=R 'Store in use values of L & R
L=0 : R=255
SEROUT 1,84,["!O SL=0",CR] 'Clear the check box
GOSUB TrackTimer
L=XL : R=XR 'Restore in use values of L & R
GOTO Tracks
Tracks:
SEROUT 10,$4054,[255,0,R] 'Output VAR R to Motor0
SEROUT 10,$4054,[255,2,L] 'Output VAR L to Motor2
GOTO Main
TrackTimer:
SEROUT 10,$4054,[255,0,R] 'Output VAR R to SSCI Motor0
SEROUT 10,$4054,[255,2,L] 'Output VAR L to SSCI Motor2
PAUSE 1000
RETURN
ClearChecks:
SEROUT 1,84,["!O FF=0",CR] : SEROUT 1,84,["!O FS=0",CR] 'Remove checks
SEROUT 1,84,["!O BF=0",CR] : SEROUT 1,84,["!O BS=0",CR] 'Remove checks
RETURN
Beep1:
FREQOUT 11,750,2500
RETURN
Beep2:
FREQOUT 11,200,2500
FREQOUT 11,200,2800
RETURN
MACRO ( Running on StampPlotPro on PC )
01-11-2005
Vehicle GUI via Bluetooth
Stuart Weightman
' **** StampPlot GUI construction ****
INIT:
!RSET
!NPSU OFF
' Set as default macro
!DEFS (ME)
!MACR .OBJECTS
' Set Queue size
!QSIZ 5185
' Set analog span
!SPAN 0, 250
' Set max time
!TMAX 120
' Set number of samples
!PNTS 2000
' Title plot
!TITL GUI Bluetooth control Macro -- Stuart Weightman
' Flush old data
!FLSH ON
!DISP D9 G2 A0 S0 B15 R
!ECHO OFF
!SETD 1,1
' Reset the plot
!RSET
' Enable plotting
!PLOT ON
' Connect port on startup
!CONN ON
ENDMAC
OBJECTS:
' Clear all objects
!POBJ Clear
' Set plot percentage
!PPER 40,40
' Background = Blue
!O oBack=(Blue)
' Create a H slider object called PAN
!O oHSlider.PAN=44.5,59,33,30,0,255,127
' Create a V slider object called TILT
!O oVSlider.TILT=40,100,10,40,0,255,127
' Create a red stop button with check box
!O oCheck.EStop=84.5,74.5,7,6,STOP,0,12,0,10
' Create check object
!O oCheck.FF=85,96,6,7,Forw Fast,8
' Tip
!O FF.tip=Both tracks forward fast
' Create check object
!O oCheck.FS=85,86,6,7,Forw Slow,8
' Tip
!O FS.tip=Both tracks forward slow
' Create check object
!O oCheck.BS=85,65,6,7,Back Slow,8
' Tip
!O BS.tip=Both tracks Backward slow
' Create check object
!O oCheck.BF=85,55,6,7,Back Fast,8
' Tip
!O BF.tip=Both tracks Backward fast
' Create check object
!O oCheck.FR=92,96,6,7,Forw Right,8
' Tip
!O FR.tip=Both tracks Forward right
' Create check object
!O oCheck.FL=78,96,6,7,Forw Left,8
' Tip
!O FL.tip=Both tracks forward left
' Create check object
!O oCheck.BL=78,55,6,7,Back Left,8
' Tip
!O BL.tip=Both tracks Backward left
' Create check object
!O oCheck.BR=92,55,6,7,Back Right,8
' Tip
!O BR.tip=Both tracks Backward right
' Create check object
!O oCheck.SR=92,75,6,7,Spin Right,8
' Tip
!O SR.tip=Both tracks Spin right
' Create check object
!O oCheck.SL=78,75,6,7,Spin Left,8
' Tip
!O SL.tip=Both tracks Spin left
ENDMAC
Thank You
|
|