|
Path Planner
Robert Gran from Sweden [2 posts] |
14 year
|
Hello!
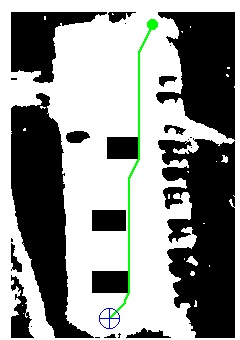
I have a question about the path planner. The path that is calculated (green line, avoiding non zero pixels), is that stored somewhere in terms of X and Y coordinates that i can used in MATLAB ?

|
|
|
|
Robert Gran from Sweden [2 posts] |
14 year
|
|
Bump. I could really use the help. Anyone?
|
|
|
|
Anonymous |
14 year
|
See the most recent update. That module now creates a variable array called
PLAN_COORDINATES - An array that includes all the path points as displayed by the path planning module.
You should be able to send/save/etc that array to elsewhere.
STeven.
|
|
|
|
Anonymous |
14 year
|
Steven,
How to plan the path for on board camera robot with using shape match module. Is there any method than using AVM navigator. How if i dont wanna use AVM module. Is that possible?
|
|
|
|
Anonymous |
14 year
|
|
anyone?? please help me. :(
|
|
|
|
EDV [328 posts] |
14 year
|
I see ROS as one of alternatives of AVM Navigator but let's try to compare these navigation systems:
1. First ROS navigation system can't quickly recognize actual robot location and it force robot to rotation long time on the spot:
http://www.youtube.com/watch?v=zq8AcR-vL7M
But AVM navigation system recognizes actual location from input images of robot camera immediately:
http://www.youtube.com/watch?v=qVz9iBazqug
2. The ROS navigation system sometimes works too slowly and not always has success with navigation goal:
http://www.youtube.com/watch?v=2hs4RQai_os
3. Minimal price of needed for ROS navigation equipment is $1,399.00 (TurtleBot):
http://store.clearpathrobotics.com/collections/turtlebot/products/turtlebot-complete
AVM Navigator only needs motorized video camera that further connects to PC.
4. ROS is complicated system that is too hard for understanding by novice users.
AVM Navigator is simple in using.
*How it works?
In our case the visual navigation for robot is just sequence of images with associated coordinates that was memorized inside AVM tree. The navigation map is presented at all as the set of data (such as X, Y coordinates and azimuth) that has associated with images inside AVM tree. We can imagine navigation map as array of pairs: [image -> X,Y and azimuth] because tree data structure needed only for fast image searching. As you properly know, the AVM algorithm can recognize image that was scaled. And this image's scaling really is taking into consideration when actual location coordinates is calculating.
Let’s call pair: [image -> X,Y and azimuth] as location association.
So, each of location association is indicated at navigation map of AVM Navigator dialog window as the yellow strip with a small red point in the middle. You also can see location association marks in camera view as thin red rectangles in the center of screen.
And so, when you point to target position in "Navigation by map" mode then navigator just builds route from current position to target point as chain of waypoints. Further the navigator chooses nearest waypoints and then starts moving to direction where point is placed. If the current robot direction does not correspond to direction to the actual waypoint then navigator tries to turn robot body to correct direction. When actual waypoint is achieved then navigator take direction to other nearest waypoint and so further until the target position will be achieved.
See here for more details: http://www.roborealm.com/forum/index.php?thread_id=4329#
|
|
|
|
Anonymous |
14 year
|
Anon,
What types of objects are you planning to target that will define the route? Why do you prefer not to use the AVM module? Is that not working for you?
The shape matching module requires a black and white image which can be hard to generate unless you are looking at black and white objects (like fiducials ... which you would then use the fiducial module.
Keep in mind that using a target as apposed to the AVM module requires that you calculate how the bot should move towards the target. Regardless of if the target is a green ball, a fiducial, etc. you would use a similar method. See
http://www.roborealm.com/tutorial/color_object_tracking_2/slide010.php
which shows how that is done for a green ball ...
STeven.
|
|