I have a 6-axis anthropomorphic robot performing some very detailed & intricate wood-carving. There is some error in the kinematic equations of the robot, so the positional error can amount to several millimeters when the carving spindle is oriented with significant pitch or yaw. I plan on creating an error map over the typical work area, and then I can add in offsets to compensate for the x,y,z error. I have manually measured the error using a digital camera and counting pixels, but it takes a really long time for each measurement (position the camera, force it into macro focus, takes the front & side photos, upload the images into the computer, open the image using Paint, find the features of interest, count the pixels, convert to mm).
I have found a macro webcam to use for image capture. Will the roborealm software support writing a script that allows me to automate the measurement?
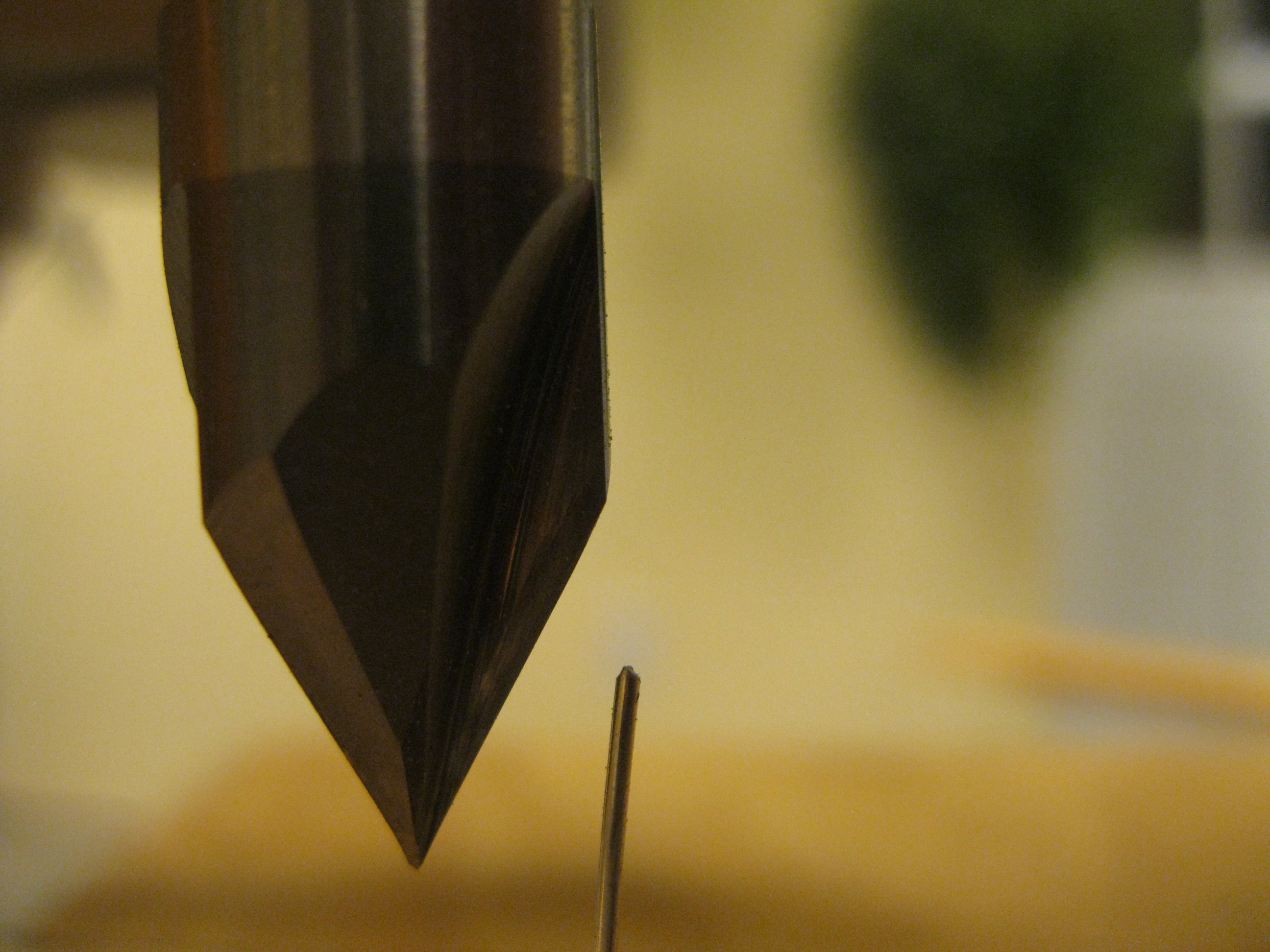
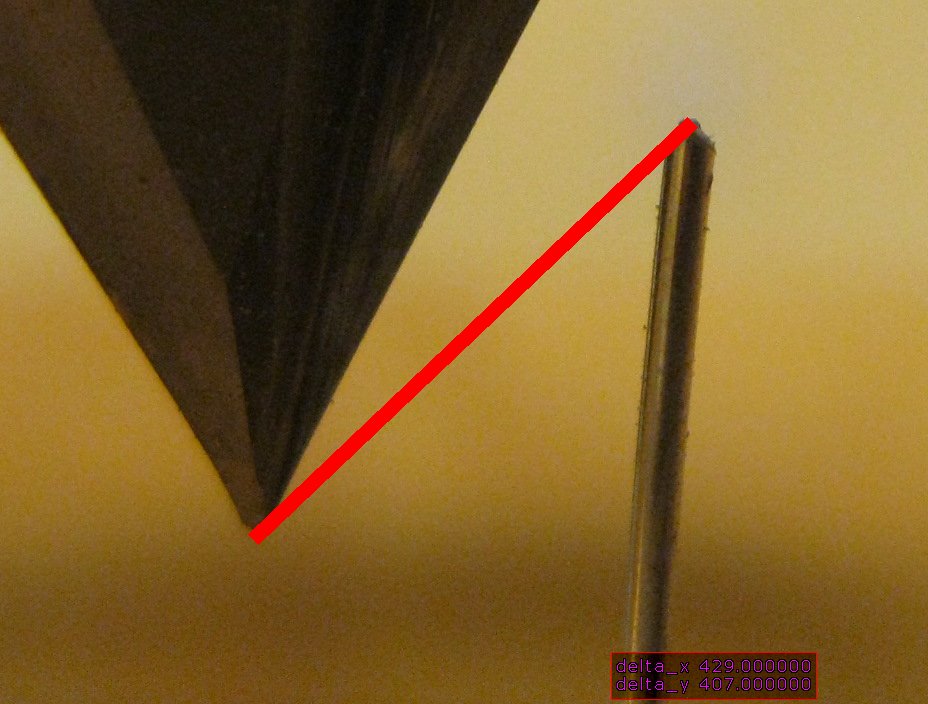
The attached image shows a router tip relative to the end of an 0.030" wire. This is enough for me to calculate X and Z distance. By taking another shot from the side, I can also get Y. Both the router tip and the wire can be replaced with something amenable to the roborealm software - like maybe red stick pins.

|
|