|
Roomba
fabrice2006 from France [11 posts] |
15 year
|
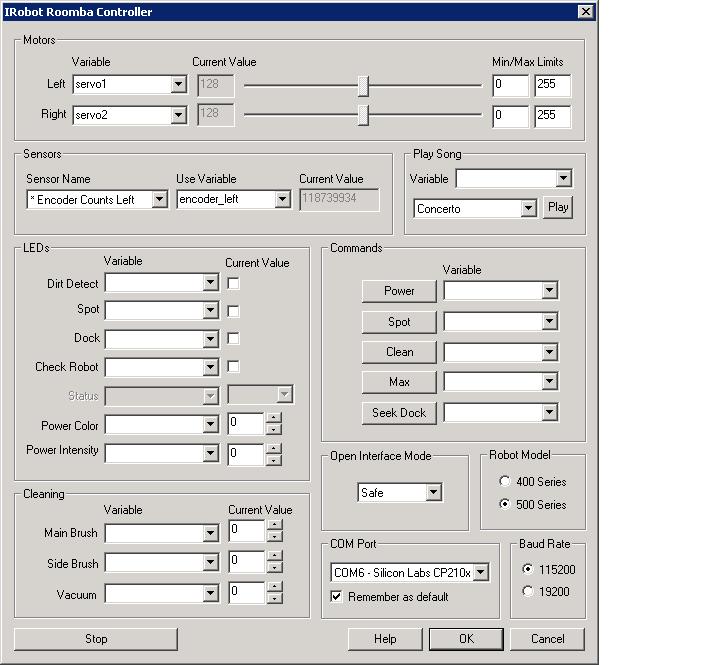
Hello, i have roborealm 2.37.3 and roomba 535 US model , and i control roomba with roborealm "irobot roomba controler" and it's works fine. But i have a problem with the values of the encoders count and also with the angle value , the value became very uge,ex :118739934 for the encoder Counts left or right (normaly value are 0-64000), can you help me please ?
Thanks a lot.
Fabrice.

|
|
|
|
Anonymous |
15 year
|
Fabrice,
The encoder counts are cumulative ... i.e they keep incrementing up, so eventually you will have really large numbers beyond the actual immediate count sent by the robot. The real question is if the numbers increase in the right direction as the most relevant aspect is the delta between one instance and the next. For example, if you are at point A with 118739934 and then move to point B with count 118749934 then you have moved 10000 encoder clicks.
Also note we've seen some issues with very slow speeds and the encoder counts not changing.
Do you ever see the counts near zero? Do they decrease or turn negative when you move the other direction? If not we can try to investigate further as to what may be going wrong.
STeven.
|
|
|
|
fabrice2006 from France [11 posts] |
15 year
|
Hello Steven, thanks for your response.
I see counter near zero when i reset roomba completely, but do you know how too reset the encoder counter without reseting roomba? In all direction , the counter increase and never decrease, it's same for then "angle counter".
The value of the counters seem erratic, for example for the same displacement of 20 cm i have:
63401203-63532679 = 131476
63532679-63533130 = 451
63533130-63599145 = 66015
63599145-64123880 = 524735
Do you think there is a hardware probleme with the encoders?
Thanks you for your response.
Fabrice.
|
|
|
|
fabrice2006 from France [11 posts] |
15 year
|
Hello again, i think i have found the problem, when the robot move backward the encoder value are erratic, it's happened also when the robot stop too brutaly ( the wheel are surely move backward...) or when the robor turn ... So is there a solution for this fake measurement when wheels goes backward ?
thks for your help.
Fabrice.
|
|
|
|
Anonymous |
15 year
|
Fabrice,
Sounds like a hardware failure somewhere in the reversing of the robot. What you could try to do is to ignore in software any measurement where the robot motor values are close to zero or reverse. However, the robot motors may also become erratic due to the bad encoder values (i.e. the robot movement is based on the values of the encoders ...). Best solution would be to get a new wheelset or another Roomba.
STeven.
|
|