|
Need Advice for a Competition
Muhammad Haris Iqbal from Pakistan [4 posts] |
17 year
|
Hello Experts out there!
Can anyone be kind enough to guide me on this competition?
Check out the site:
http://www.ceme.edu.pk/nerc/
I've got my base ready with peg insertion mechanism installed.
I need expert advice on RoboRealm, about how can I achive my goal? What Strategy should I use? What Modules should I use?
Ive got Dimension Engineering Sabertooth 2X5 motor controller, which I am intending to use with the laptop n the base!
Someone Please Guide!
|
|
|
|
Muhammad Haris Iqbal from Pakistan [4 posts] |
17 year
|
Still no replys? :(
Guide me I am new to this world.
|
|
|
|
Anonymous |
17 year
|
Muhammad,
1. The best thing to do right now is to familiarize yourself with the floor-plan and ensure that you have ample access to one in order for testing. If you don't have access to one start building one as you will need it in order to test your robot.
2. Then decide on what sensors you will be using to accomplish the tasks. Seems like IR distance sensors and/or vision might be used for this. In terms of vision you will need to take some sample images from the ROBOT's point of view in order to understand what it will be seeing and how the objects may appear in various lighting situations.
This will be the hardest part as you will need sensors to perform various tasks.
1. Navigation (are you going to use the white lines or not?)
2. Picking up the peg (how do you know where the peg storage is and how do you know when you have reached the storage device to pick up a peg).
3. How will you detect the location to put the pegs. They mention a transparent device which will probably be very hard to use vision to see.
My initial inclination for this competition would be not to use vision but to use a line and distance sensor. The line sensor to be used to get the robot around the floor and the distance sensor to tell it when it has approached either the peg storage or the peg destination. I'm not sure vision really needs to be used for this competition.
Or do I not understand the competition correctly?
STeven.
|
|
|
|
Muhammad Haris Iqbal from Pakistan [4 posts] |
17 year
|
Thanks for the reply Mr. STeven,
I've got access to the floor-plan, we've got one built. The peg stands we've got in the preliminary stage of the competition are built out of wood, so this means there wont be an issue of camera failing over here, can you suggest how can we start from point B and move to a peg stand by detecting it?
You asked about the picking of the pegs....they are pre-loaded on the bot!
About navigation, you tell what would be better, will it be line detection through the camera or the peg stand detection?
Tell us something that will help us get through the preliminary stage for now using vision only!
Thanks in Advance!
|
|
|
|
Anonymous |
17 year
|
Ok, phase II, take lots of pictures.
Can you include at least two pictures here that show what the peg stand looks like from the point of view of the robot? Then we can see how easy/hard it would be for the robot to detect the peg location and move towards it.
Note that the angle of view from the robot camera will be very important. Too high an angle will cause off floor-plan objects but too low will cause the robot not to see enough of the floor-plan to detect anything.
STeven.
|
|
|
|
Muhammad Haris Iqbal from Pakistan [4 posts] |
17 year
|
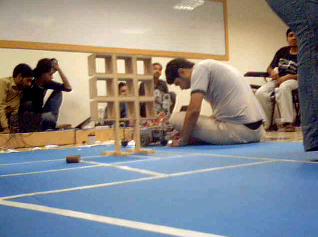
Here are some snaps, taken from the web camera I am using.
I think if we try to train and define the peg stand as a blob or something, we might be able to do something, unfortunately I dont know much about RoboRealm's Blob Filter.
The stands are quiet visible, what do you think?
Please guide step by step about what strategy should I follow?
Thanks for your time!
   
|
|
|
|
Anonymous |
17 year
|
Muhammad,
Unfortunately no, the peg stands would be very difficult to segment out from the rest of the image. The peg stands are made of wood which blend into the wall/floor coloring and do not have a uniform texture/color. I would not recommend using vision for detecting these unless you have a couple months (if not years) to figure out. Again, I would default back to some ir distance sensor that would tell you an object is in front of the robot.
STeven.
|
|