|
Tracking Object with camera movement only
Menec from Greece [5 posts] |
17 year
|
Hy !!!
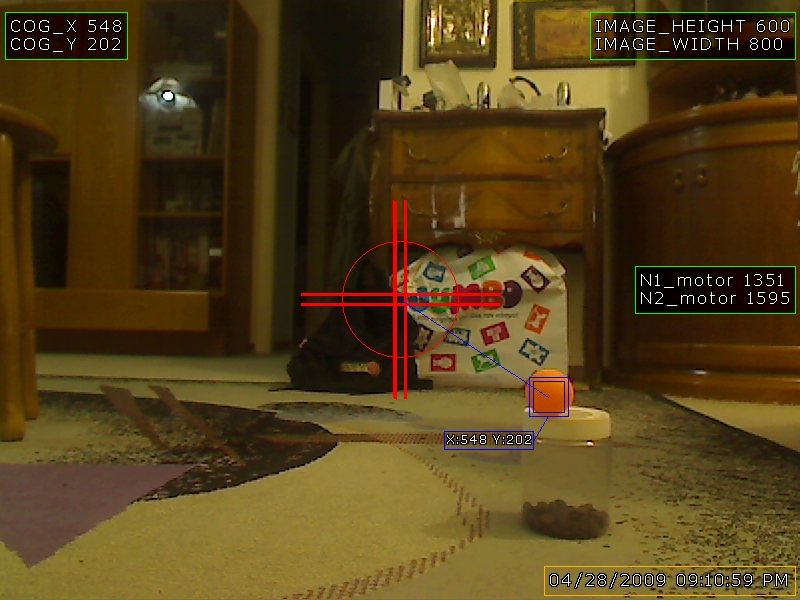
I have a SSC-32 (servo controller) with two servos 180o (not continuous rotation servos). And as you can see in the first image i have established them with a camera so the camera can move " up-down" and "left-right".
What i am trying to do is to track the orange ball in the second picture.
My VBscript is this one:
if cogx = 0 then
N1_motor = 1500
else
if cogx > 0 then
N1_motor = 1900 - cogx
end if
end if
if cogy = 0 then
N2_motor = 1500
else
if cogy > 0 then
N2_motor = 1800 - cogy
end if
end if
SetVariable "N1_motor", N1_motor
SetVariable "N2_motor", N2_motor
The problem is that when the camera is trying to go on the target then its run crazy and the camera moves left, right, up and down of the target without stopping.
what can i do so the camera will go straight to the target and stop on it.
I am sending you all my robo file!!!
Thanks Menec
  
 program.robo program.robo
|
|
|
|
Anonymous |
17 year
|
Menec,
I think you are not realizing that the center of the image is actually the coordinate 400,300. Thus your VBScript would probably be more like
cogx = GetVariable("cog_x")
cogy = GetVariable("cog_y")
w = GetVariable("IMAGE_WIDTH")
h = GetVariable("IMAGE_HEIGHT")
N1_motor = 1200+ ((cogx / w) * (1900 - 1200))
N2_motor = 1200+ ((cogy / h) * (1900 - 1200))
SetVariable "N1_motor", N1_motor
SetVariable "N2_motor", N2_motor
which would scale the N1 motors from 1200 to 1900 (I'm assuming that is the correct range) based on how far the cogx location is. Same for cogy.
You may have to tweak the range by reducing the number a bit to slow down the motors ... so if they really jerk try 400 instead of 700 (1900-1200).
STeven.
|
|
|
|
lim from Malaysia [2 posts] |
16 year
|
|
Can show the actual programming of this targeting object system with 2 servo motors?
|
|