|
Image detection
Jafni from Malaysia [29 posts] |
17 year
|
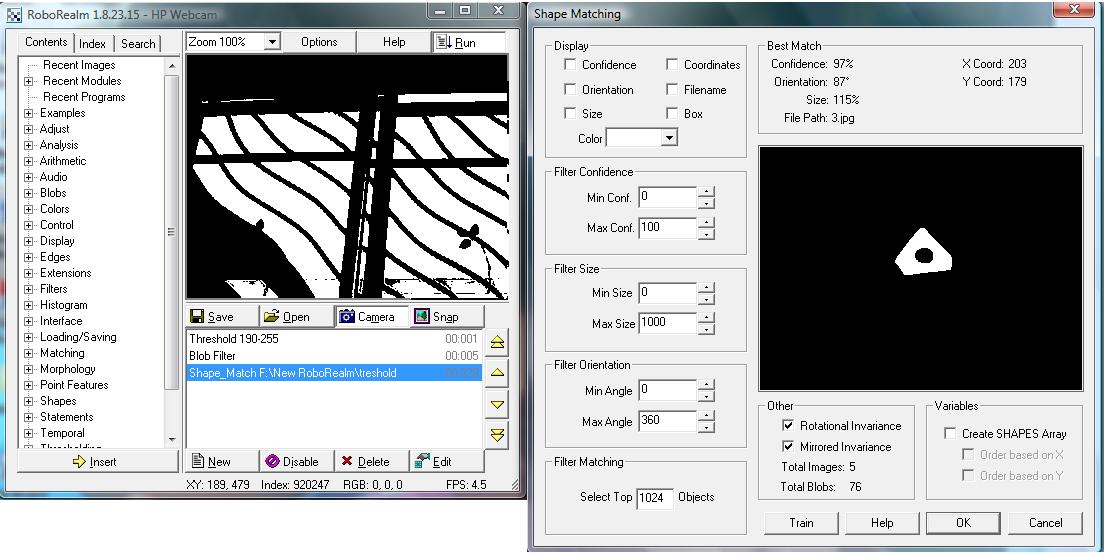
I have done treshold type with 4 picture, it can detect every kind of picture but when the camera go to other area sometime it also can detect some picture, I already try to put some picture with many kind of shape but it still same, can you help me? I also provide an example.....

|
|
|
|
Anonymous from United Kingdom [99 posts] |
17 year
|
Glad to see that you are making progress with your project! I recall that you were trying to pick different shapes (like a square, triangle, circle) out from background.
Different lighting environments, camera angles and surface materials all effect the image and how it is processed. Also your camera may be automaticaly adjusting exposure and gain as lighting changes. Ideally you want to limit these things as much as possible by using overhead lighting, or source lighting. I have had good success using a small linear polarizer over the camera lens (with the polarization axis oriented vertically) This eliminates most problems with specular reflections but cuts the light to the camera by about 30%.
I can see that you are doing thresholding and blob matching on the first image to reduce the image to a nicely segmented black and white image. What features are you looking for in this image? Could you post a picture of what you are trying to shape match and give a more detailed description to help explain the problem? Could you also post the original image?
have fun!
|
|
|
|
Jafni from Malaysia [29 posts] |
17 year
|
Thank you...
Actually I want to make this robot move and it will stop for a second when it really sense that image and know what room when it stop. When the robot moves it will sense images of object but the problem is the camera produces images before it really sense the object. Firstly, I use image like triangle, rectangle and circle but the same problem occured so I changed the image, the problem still same. Can you help me?




|
|
|
|
Anonymous |
17 year
|
jafni,
I'm not sure I fully understand what your problem is? Is the matching not working?
In your first post the real image does not appear to contain the shape at all and thus would not match. Perhaps you can include the original full color images that you expect the images above to match to and we can take a look as to why they are not matching.
Or is your issue that the matching IS working but you do not know how to use the information from this point on to control your robot?
STeven.
|
|
|
|
Anonymous |
17 year
|
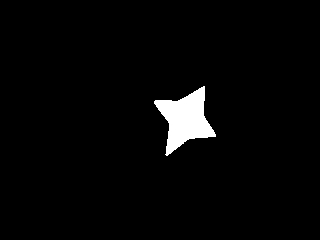
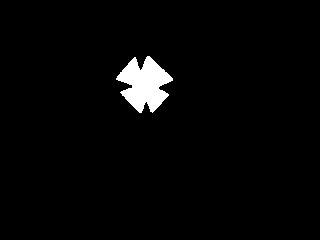
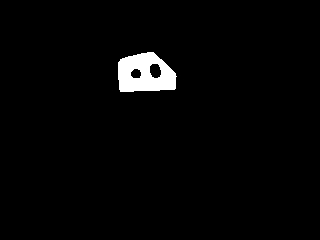
For the mean time, I could make the camera detect all the four pattern above.
The roborealm could differentiate pattern and produce the correct output when it looks at the correct pattern. When the robot moves it will detect images of the objects but the problem comes when it looks at bright area, the roborealm become unstable due to filter problem. Actually their image is white and their background is black same as treshold filter. Because I'm afraid if I do another color the another problem will come. For meantime I just do this kind of detection. I hope you will help me to solve this problem.
|
|
|
|
Anonymous |
17 year
|
jafni,
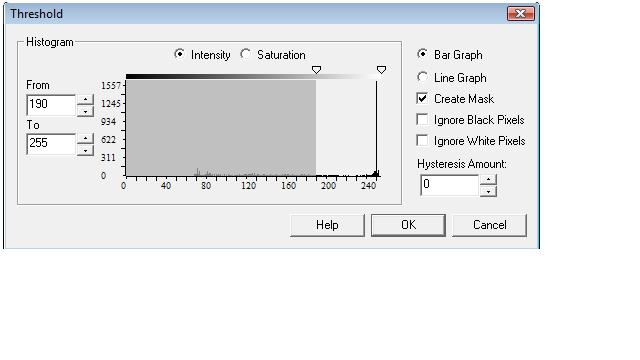
Could you include the image where this is failing and your robofile (roborealm configuration) that you have so far? We cannot tell what to do based on your description alone and would need to see an image where this is failing to understand how to fix it. If the image you are talking about is already black and white be sure that you are still thresholding as many seeming back and white images actually still have slightly different gray values that still need to be thresholded. An image would help us verify this issue ....
STeven.
|
|
|
|
Jafni from Malaysia [29 posts] |
17 year
|
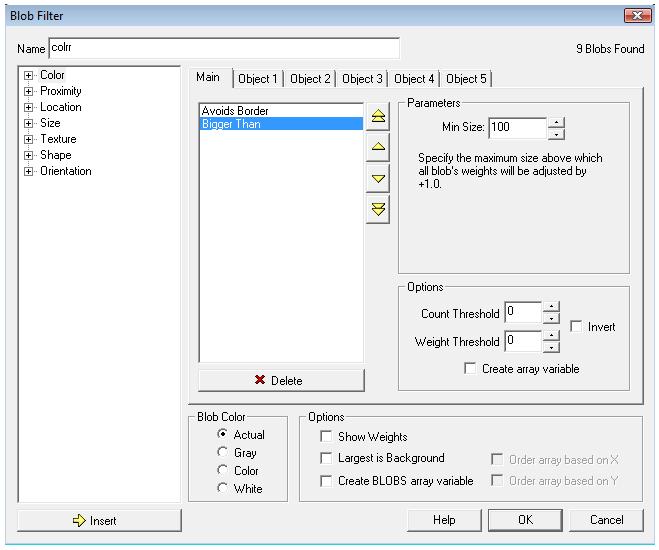
I've added the image that you want, for time being I just use treshold, blob filter and shape matching. Please help me.....






 program.robo program.robo
|
|
|
|
Anonymous |
17 year
|
Jafni,
See the attached .zip file. Within it are the original images that you wish to identify, the images to train on (in the train folder) and the robofile that we used to test. You will need to edit the shape matching and retrain it on the right folder as the folder we have used will most likely not be the same as yours.
Note that we use the adaptive_threshold module to segment the shapes from the background which in your case works better than a standard static thresholding.
Let us know if you have any additional questions.
STeven.
 jafni.zip jafni.zip
|
|
|
|
Anonymous |
17 year
|
STeven,
Thank's a lot... I will ask you if I have any question...
Jafni.
|
|