|
Roborealm and robosapien
Anonymous from United Kingdom [99 posts] |
18 year
|
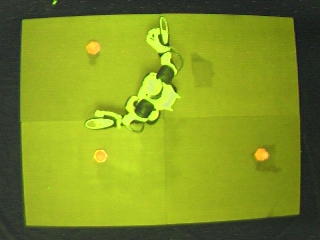
I built a PC Robosapien interface which just takes serial commands and sends out Robosapien IR, it was pretty straight forward to get it working with Roborealm using the serial module at 4800 8N1. I put together a quick arena to provide a good surface and background for the Robosapien and started working on implementing the path planning module to design a path based on an overhead camera looking at a series of waypoints, in this case the Robosapien's bowling pins. The biggest problem right now is that the Robosapien moves around so much from side to side it is difficult to track his orientation relative to the path.
Any hints on how to extract the direction of the robosapien without pasting a big green triangle on his head? (I could do this) There is video of him staggering and a brief writeup at:
http://profmason.com/?p=451
On another note I just ordered a Dream Cheeky USB controlled car:
http://www.geeks.com/details.asp?invtid=056&cpc=SCH
I have hopes that the protocol might be sufficiently similar to the Dream Cheeky missile launcher that it would be an easy thing to get working with roborealm. I will futz with it when I get it and bring it to the December meeting.

|
|
|
|
Ricardo Sampaio from Portugal [32 posts] |
18 year
|
U can paint, or put a 2 LED on the shoulders (or hand's) whit 2 different colors (like airplains or boats) and get the direction.

|
|
|
|
Anonymous |
18 year
|
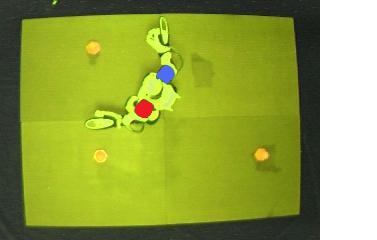
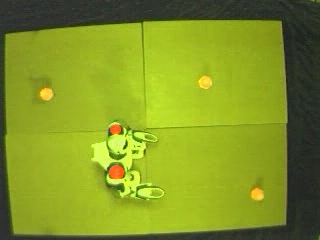
The two color dots is probably the way to go but here's another just for fun. In this case we're detecting the black shoulder area and checking to see how close the two virtual dots are to eliminate noise when the robot leans too far off center. This means for some period of time there is no data ... but hopefully as the robot leans back center the algorithm regains the shoulder orientation.
From there you would calculate the vector between the two circles to determine orientation as in the red/blue dot technique.
Note this would give you a 180 degree ambiguity which does not happen with the red/blue dots. This ambiguity could be resolved by using last movement direction.
Anyhow, this is probably not a practical solution but an interesting one nonetheless.
Note that you will have to specify the avi video in the AVI Reader module as your path will not be the same as ours. See prof mason's website
http://profmason.com/wp-content/uploads/2007/11/robosapien.avi
to download the avi video.
Also note that the AVI reader is set to half speed playback.
STeven.

 program.robo program.robo
|
|