Description
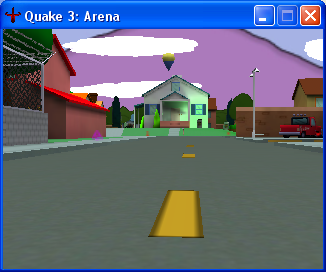
The "AVM Quake 3 mod" provides
environment emulation of real world with transmitting of live video to AVM
Navigator plugin.
The "Quake 3 virtual camera" and
"Robot control module" plugins provides interaction of AVM Navigator
with virtual 3D environment.
Setup
- First install RoboRealm
package with AVM Navigator v0.7 plugin.
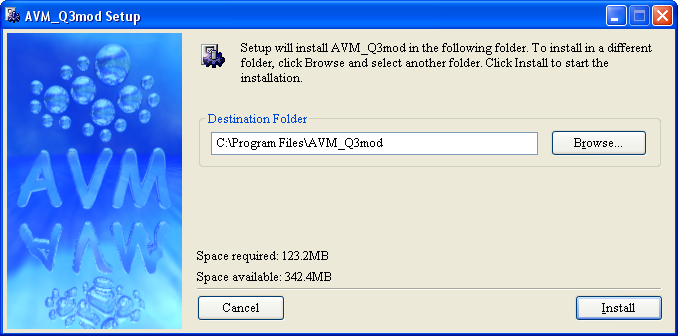
- After RoboRealm installation
you should install Setup_avm_q3mod.exe package.
- The "AVM Quake 3 mod"
and RoboRealm will start automatically when installation of
Setup_avm_q3mod.exe package will be done.
Quick
start after installation
- Press Alt-Tab for jump
from "AVM Quake 3 mod" to RoboRealm dialog window.
- Call the dialog window of AVM
Navigator (click on it at video-processing pipeline). Now you can
control your robot by arrow keys and also you can turn robot camera
by "Delete" and "Page Down" keys ("End" key
will set the camera in front position). If camera was turned you have to
press "End" for alignment before continuing of robot
moving.
How
to get start
- Start the "AVM Quake 3
mod" (click on "AVM_Q3mod" shortcut at your desktop)
and RoboRealm application
with q3cam, Navigator and RobotDrv plugins in
video-processing pipeline.
- Press Alt-Tab for jump
from "AVM Quake 3 mod" to RoboRealm dialog window.
- Make sure that "Camera"
button is pressed in RoboRealm dialog window and also you should check out
the camera resolution (it must be 320x240 pixels).
- Call the dialog window of AVM
Navigator (click on it at video-processing pipeline) and then switch
to "Nova gate mode". Now you can control your robot by arrow
keys and also you can turn robot camera by "Delete" and
"Page Down" keys ("End" key will set the camera in
front position). If camera was turned you have to press "End"
for alignment before continuing of robot moving.
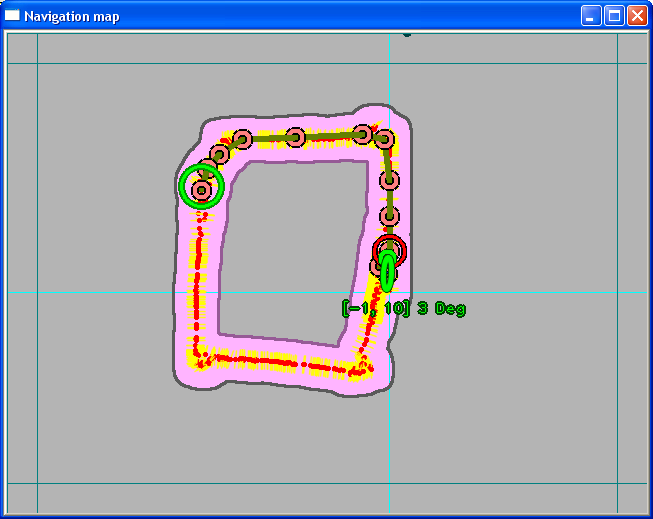
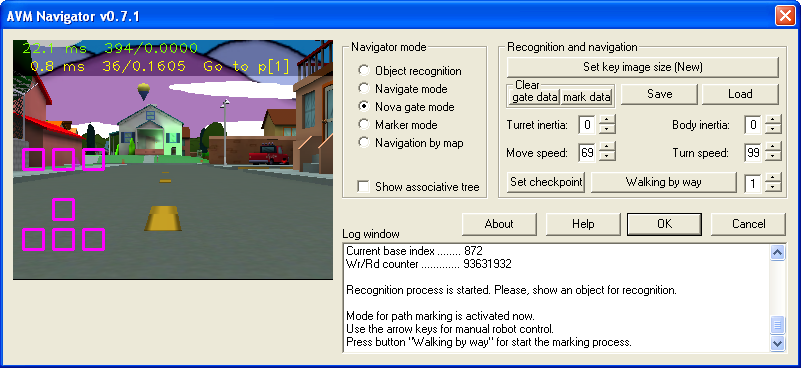
Forming
of navigation map
- Move your robot to the start
position (use "Nova gate mode" for moving). In this
position will be placed origin of navigation map.
- Reset markers data information
by click at "Clear/mark data" (if it needed).
![]()
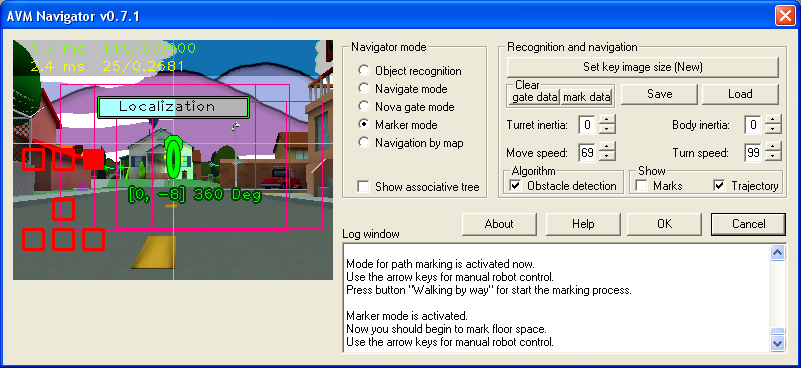
- Switch to "Marker
mode" and then you should manually lead the robot along a route.
- In the end of route you should
switch to "Nova gate mode" and then save route data
(click "Save") to the file that will has different name with
default "avm.dat" (you can use it as backup if needed).
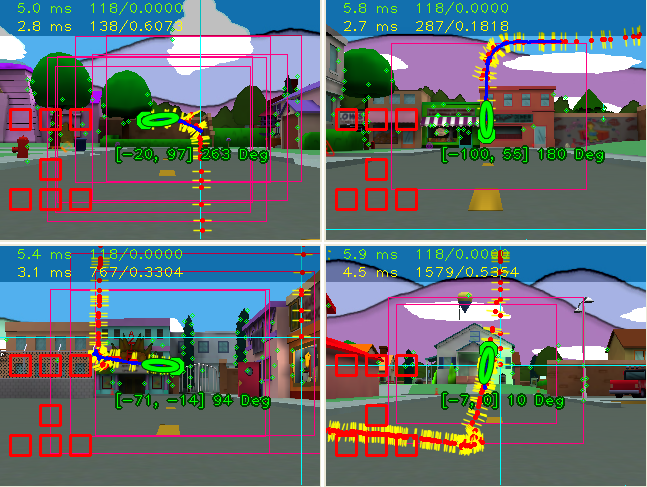
- You should repeat items 1 - 4 several
times for good detailing of navigation map.
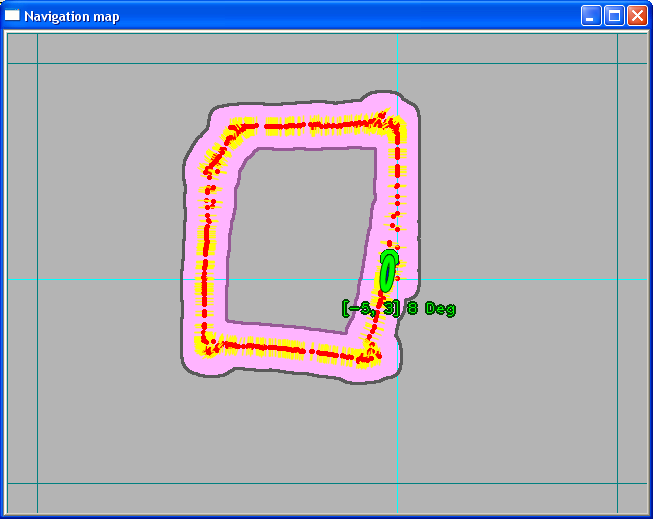
Navigation
by map
- Return to the start position
and switch to "Navigation by map" mode then you should
point robot to the target position at the navigation map (click the left
mouse button on the map) and robot automatically will navigate to this
point.